B.2 Parameter Table
YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07) 371
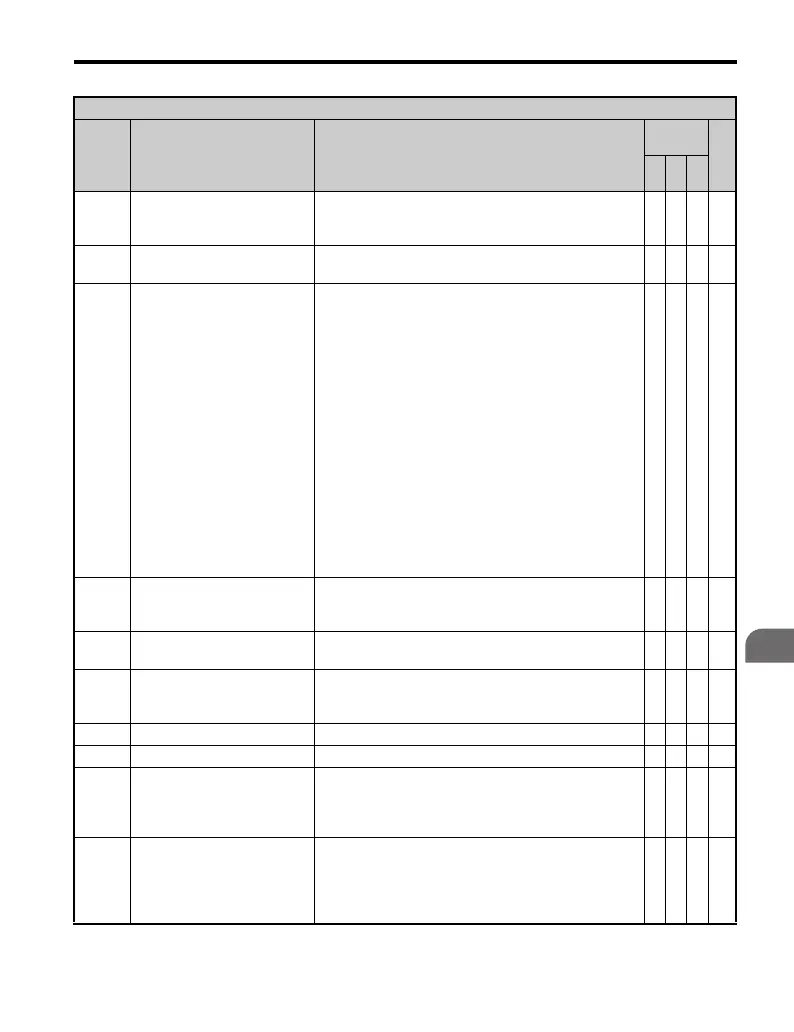
Parameter List
B
1B Program Lockout
Open: Only the frequency reference monitor (U1-01)
may be saved.
Closed: Parameters may be edited and saved.
OOO—
1E Reference Sample Hold
Closed: Samples the analog frequency reference and
operates the drive at that speed.
OOO—
20 to
2F
External Fault (user selection
possible)
20: N.O., Always Detected, Ramp To Stop
21: N.C., Always Detected, Ramp To Stop
22: N.O., During Run, Ramp To Stop
23: N.C., During Run, Ramp To Stop
24: N.O., Always Detected, Coast To Stop
25: N.C., Always Detected, Coast To Stop
26: N.O., During Run, Coast To Stop
27: N.C., During Run, Coast To Stop
28: N.O., Always Detected, Fast-stop
29: N.C., Always Detected, Fast-stop
2A: N.O., During Run, Fast-stop
2B: N.C., During Run, Fast-stop
2C: N.O., Always Detected, Alarm Only (continue
running)
2D: N.C., Always Detected, Alarm Only (continue
running)
2E: N.O., During Run, Alarm Only (continue running)
2F: N.C., During Run, Alarm Only (continue running)
OOO—
30 PID Integral Reset
Closed: Resets the PID control integral value.
A stop command was entered during PID control or PID
was reset while the drive was stopped.
OOO—
31 PID Integral Hold
Closed: Maintains the current level of the PID control
integral.
OOO—
32 Multi-Step Speed Reference 4
The values set to d1-01 through d1-16 can be selected
using a combination of multi-step speed reference 1
through 4.
OOO—
34 PID Soft Starter Closed: Disregards b5-17. O O O —
35 PID Input Switch Closed: Reverses the PID fault signal (1 to -1 or -1 to 1) O O O —
40
Forward Run Command
(2-wire sequence)
Open: Stop
Closed: Forward run
Note: Settings 42 and 43 cannot be utilized at the same
time.
OOO—
41
Reverse Run Command
(2-wire sequence)
Open: Stop
Closed: Reverse run
Determines direction only. Simply switching this signal
on or off does not issue a run command.
Settings 42 and 43 cannot be used at the same time.
OOO—
H1 Multi-Function Digital Input Selections
H1-
Setting
Function Description
Control
Mode
Pg.
V/
f
O
LV
P
M

 Loading...
Loading...










