B.2 Parameter Table
390 YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07)
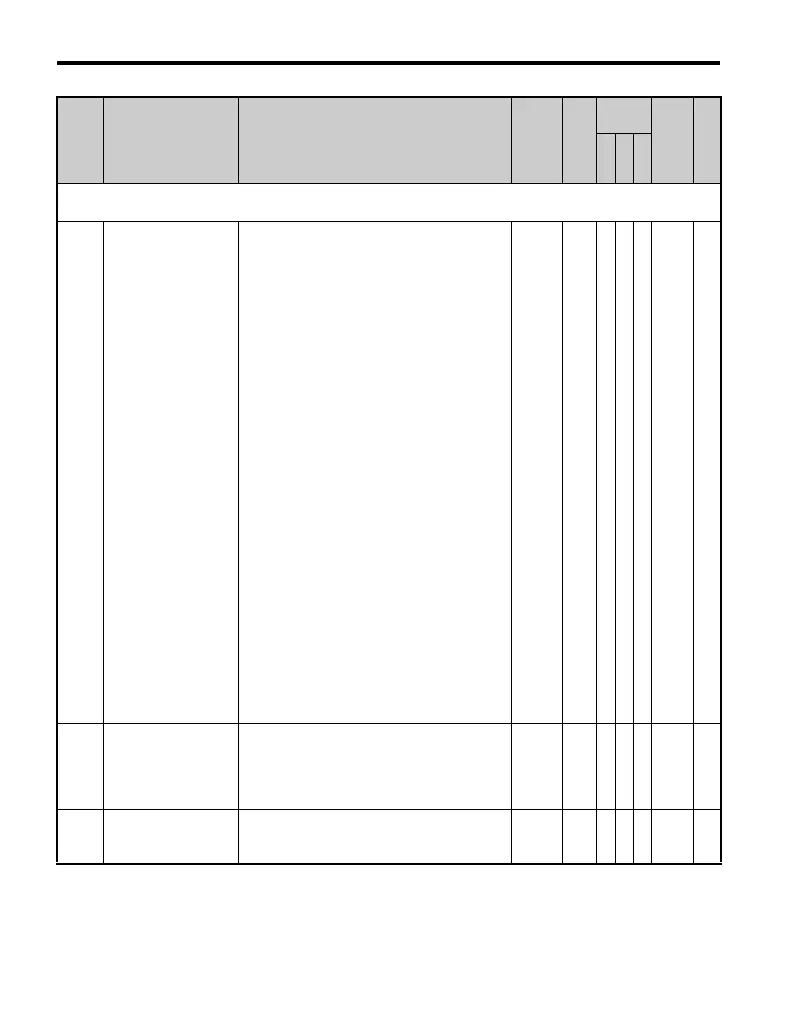
L6: Overtorque Detection
Use L6 parameters to configure overtorque detection.
L6-01
Torque Detection
Selection 1
Sets the response to an overtorque/undertorque
condition. overtorque and undertorque are
determined by the settings in parameters L6-02
and L6-03. The multi-function output settings
(H2- = B and 17) are also active if
programmed.
0: Disabled
1: OL3 at Speed Agree - Alarm (overtorque
detection only active during Speed Agree and
operation continues after detection).
2: OL3 at RUN - Alarm (overtorque detection
is always active and operation continues after
detection).
3: OL3 at Speed Agree - Fault (overtorque
detection only active during Speed Agree and
drive output will shut down on an OL3 fault).
4: OL3 at RUN - Fault (overtorque detection is
always active and drive output will shut down
on an OL3 fault).
5: UL3 at Speed Agree - Alarm (undertorque
detection is only active during Speed Agree
and operation continues after detection).
6: UL3 at RUN - Alarm (undertorque detection
is always active and operation continues after
detection).
7: UL3 at Speed Agree - Fault (undertorque
detection only active during Speed Agree and
drive output will shut down on an OL3 fault).
8: UL3 at RUN - Fault (undertorque detection
is always active and drive output will shut
down on an OL3 fault).
0 to 8 0 A A A 4A1 —
L6-02
Torque Detection
Level 1
Sets the overtorque/undertorque detection level
as a percentage of drive rated current or torque
for Torque Detection 1.
Current detection for A1-02 = 0 or 1.
Torque detection for A1-02 = 2 or 3.
0 to 300
150
%
AAA 4A2 —
L6-03
Torque Detection
Time 1
Sets the length of time an overtorque/
undertorque condition must exist before
Torque Detection 1 is recognized by the drive.
0.0 to
10.0
0.1 s A A A 4A3 —
No. Name Description Range Def.
Control
Mode
Addr.
Hex
Pg.
V/
f
O
L
V
P
M

 Loading...
Loading...










