JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x 305
16.1 MIS23x & SMC75 Registers detailed
TT24
-
1
B
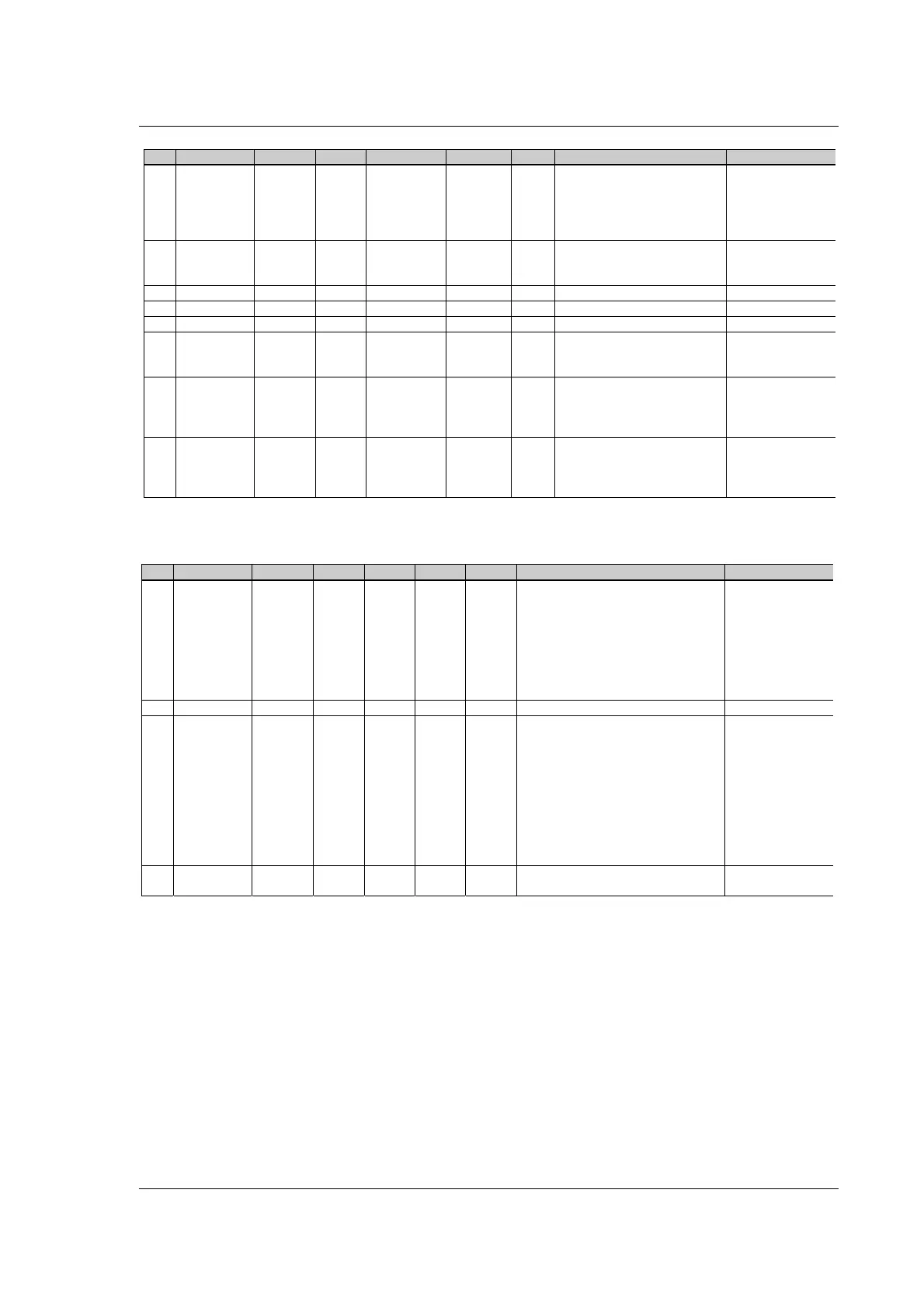
Reg Name Size Access Range Default Unit Description MacTalk name
111 SSI_Setup2 16bit R/W bitfields Bits 7:0
prepare
time, Bits
15:8 wait
time
us SelectsSSIpreparetimeand
wait time
Prepare time
(Clk to Data)
112
-
115
SAMPLE1-4 16bit R/W - 0 - Select what register(s) to
sample
N/A
116 REC_CNT 16bit R/W - 0 - Number of samples to make N/A
117 S_TIME 16bit R/W - 1 ms Sampletime N/A
118 S_CONTROL 16bit R/W - 0 - Controls the sample system N/A
119 BUF_SIZE 16bit R - - - The number ofsamplesthe
buffercan hold (unusedasof
FW version 3
09)
N/A
120 INDEX_
OFFSET
16bit R 0-1599 - Steps The position ofthe zero sensor
relative totheencoder index.
This is set after a zero search
where the index is used.
Tests -
121 Modbus
Setup
16bit R/W bitfields 0 - Selects configuration of the
Modbusprotocol,that can be
used instead of the MacTalk
protocol
-
TT24
1-
1
B
Reg Name Size Access Range Default Unit Description MacTalk name
122 HOME_BITS 16bit R/W - 0 Special Bits to control homing:
Bit 0: Search for index.
Bit 1: Change direction on limit.
Bit 2: Search foroppositesideof
sensor.
Bit 3: Use Limit switch as sensor.
Bit 4: Ignore switch (Used for
searching only for index).
Advanced – Zero
search
123 Reserved 16bit R/W - - - Reserved N/A
124 SETUP_BITS 16bit R/W - 0 Sepcial Bit 0: Invert direction.
Bit1: Don’tstartprogramafter
power up.
Bit 3,2:Select encoder input type.
0=Disabled,
1=Quadrature,
2 = Puls/direction
Bit4: Enable DSP402 support
Bit 5: Synchronize to encoder after
passive
Don’t start program
after power up
Invert motor
direction
External Encoder
Enable CanOpen
DSP 402 Support
Auto encoder
synchronize
125 IOSETUP 16bit R/W - 0 Special Bit 0-7 sets the I/O active level. Bit 8-15
enables the I/O as an output.
Inputs/Outputs

 Loading...
Loading...