11.5 Sample Processor
■■■■■■■■■■■■■■■■■■■■■■
96
■■■■■■■■
900 Touch Control
[Adjustment data]
Display the overview of the EEPROM data of the Swing Head. This dialog
cannot be edited.
[Edit]
Edit specific settings of the selected external position (see "Properties –
External position", page 98).
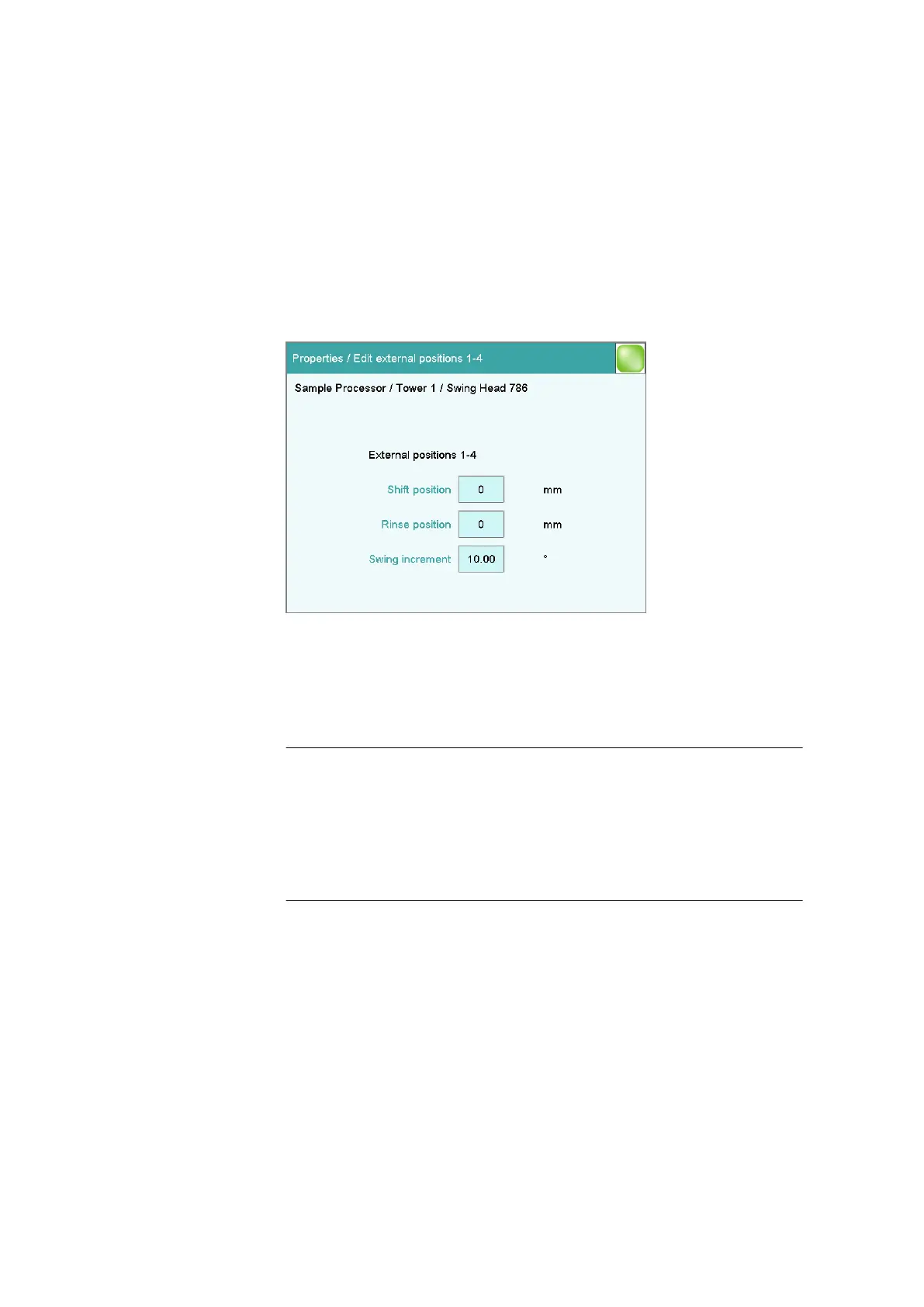
Properties – External positions 1-4
Swing Head: Properties ▶ Ext. pos. 1-4
Properties which apply to all four external positions can be defined in the
dialog Properties / Edit external positions 1-4.
Shift position
Lift position at which the robotic arm rotates to the external positions.
Input range 0 to 'Maximum stroke path' mm
Default value 0 mm
A lift position of 0 mm corresponds to the "home
position", i.e. the lift is located at the upper stop
position. The maximum stroke path is defined in the
properties of the tower (see "Maximum stroke
path", page 94).
Rinse position
Lift position used for rinsing.