Moog ACV with CANopen bus interface 7 Servo valve functions
Pressure controller
B99224-DV018-D-211, Rev. A, October 2018 175
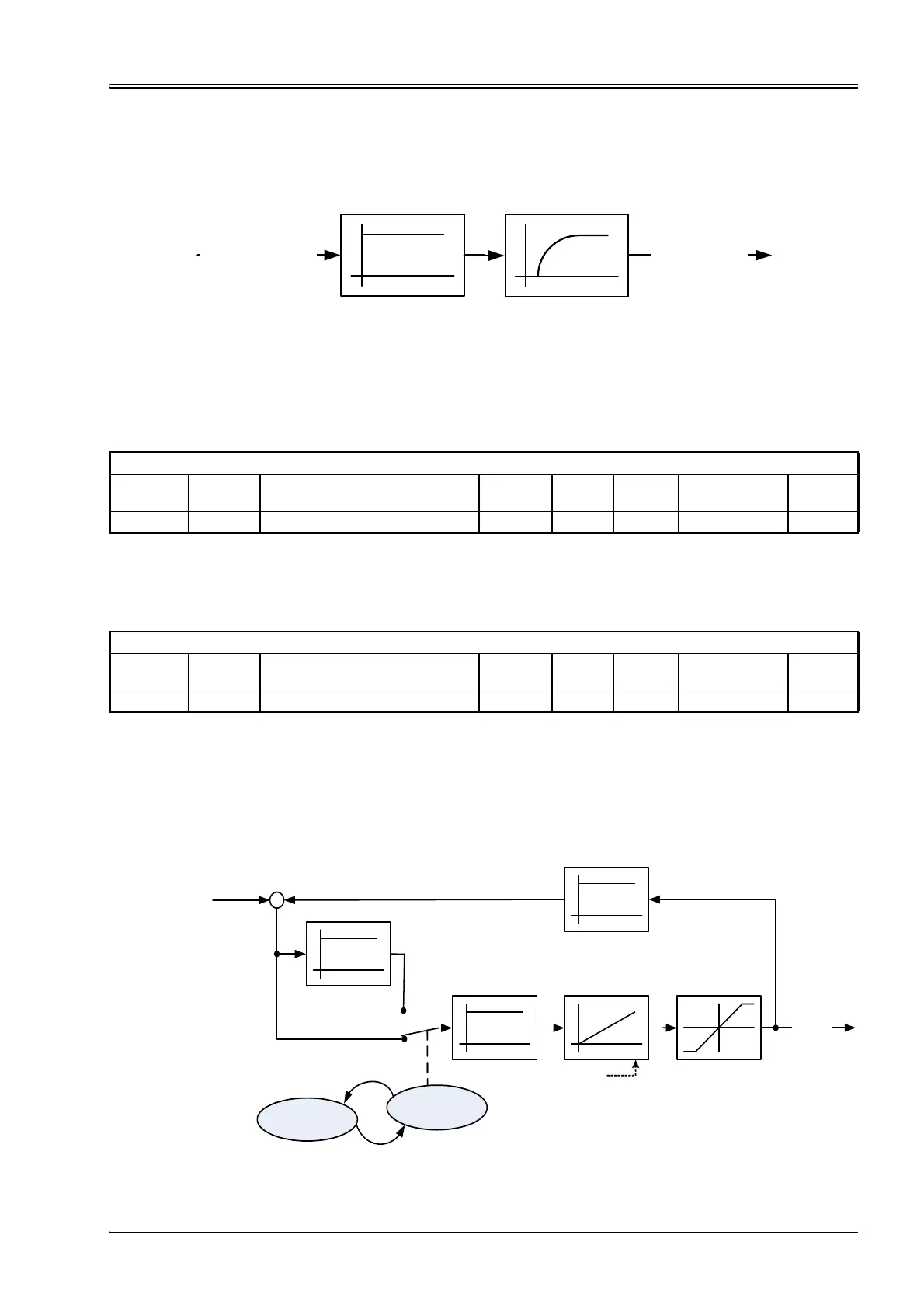
7.5.12 Proportional first order lag element (PT1)
The proportional part of the output is generated by a proportional gain (P-element) and first order lag element
(PT1-element). The input signal is the pressure control deviation.
Figure 83: Proportional first order lag element (PPT1)
7.5.12.1 Object 0x2304[N]: Proportional Gain
This parameter sets the proportional gain.
7.5.12.2 Object 0x230E[N]: Proportional gain time constant
This parameter sets the time constant in seconds of the first order lag element (PT1).
7.5.13 Integrator element (I)
To ensure a bumpless transfer between spool position and pressure control, the pressure integrator can be
set to a defined preload (#Preload#) value before switching to the pressure control.
Chapter "7.5.14 Integrator preload value", page 178
Figure 84: Integrator element (I)
<ProportionalGain>
(0x2304[N])
<ProportionalGainTimeConstant>
(0x230E[N])
<PrsControlDeviation>
(0x63D0)
<ProportionalPart>
(0x2311)
ValvePressureControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x2304 N=1…16 ProportionalGain FLOAT32 rw Y 0.0…+inf 0.0
ValvePressureControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x230E N=1…16 ProportionalGainTimeConstant FLOAT32 rw Y 0.0…+inf 0.0
<KiOutput>
(0x2310)
<IntegratorGain>
(0x2305[N])
<IntegratorUpperOutputLimit>
(0x231A[N])
<IntegratorLowerOutputLimit>
(0x231B[N])
#Preload#
<IntegralProportionalPartPGain>
(0x5861[N])
-
+
|<PrsControlDeviation> (0x63D0)| < <IntegratorControlRange> (0x2307)
#I-Input#
<IntegratorFactor>
(0x2306[N])
<IntegratorGainStatus>
(0x231D) = 1
<IntegratorGainStatus>
(0x231D) = 2
|Jump on #I-Input#| > <IntegratorGainSwitchThreshold> (0x5857)
2
1