Moog ACV with CANopen bus interface 5 Device control
Device state machine (DSM)
B99224-DV018-D-211, Rev. A, October 2018 50
5.2.2.2 DSM state transitions caused by the enable signal
The following events will lead automatically to state changes.
The enable behavior is depending on the servo valve hardware configuration.
5.2.2.3 DSM state transitions caused by internal events
The following table shows the internal events which automatically lead to a state change.
5.2.2.4 Enable behavior
The enable signal comes from the connector X1. The enable signal influences the device state machine and
can be used to acknowledge faults.
Chapter "6.7.1 Digital input 0 (enable signal)", page 100
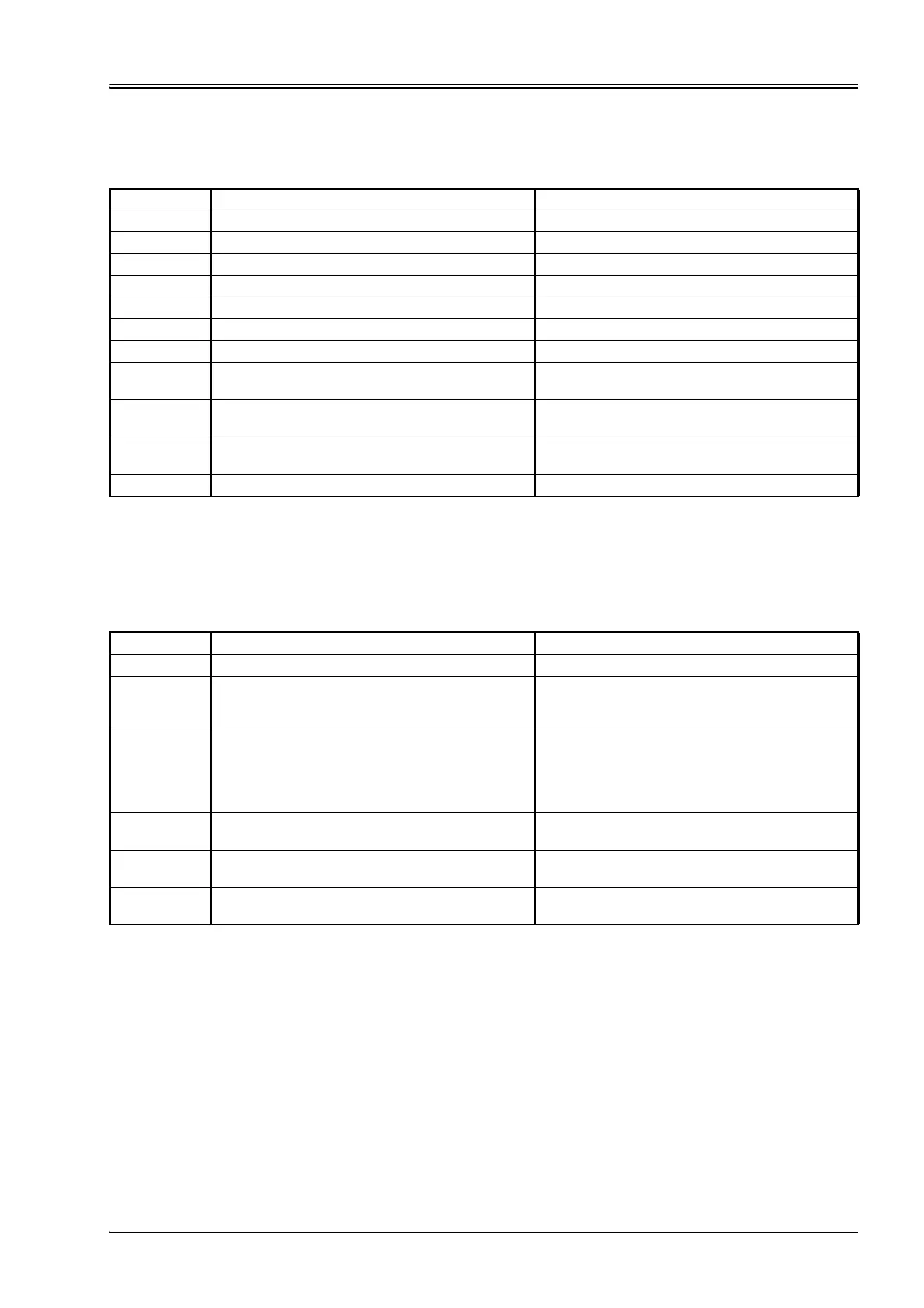
Transition (TR) Description Comments/Conditions
TR2 Activate 'DISABLED' Depending on ControlWord RMHD ≥ x001
TR3 Activate 'HOLD' Depending on ControlWord RMHD
≥ x011
TR4 Activate 'ACTIVE' Depending on ControlWord RMHD
≥ x111
TR5 Deactivate 'ACTIVE'
TR6 Deactivate 'HOLD'
TR7 Deactivate 'DISABLED'
TR9 Transition from 'FAULT_REACTION' to 'FAULT_HOLD' Depending on the enable behavior
TR10 Reset 'FAULT_DISABLED' Behavior of error output pin:
Chapter "5.2.2.5 Error output pin", page 52
TR11 Reset 'FAULT_HOLD' Behavior of error output pin:
Chapter "5.2.2.5 Error output pin", page 52
TR14 Reset 'FAULT_INIT' Behavior of error output pin:
Chapter "5.2.2.5 Error output pin", page 52
TR15 'FAULT_HOLD' to 'FAULT_DISABLED' Depending on the enable behavior
Transition (TR) Description Comments/Conditions
TR0 Power up
TR1 Device init successful. Initialization of device parameters with stored values.
Behavior of error output pin:
Chapter "5.2.2.5 Error output pin", page 52
TR8 A fault was detected.
On entering 'FAULT_REACTION' state an emergency
message is sent out.
If state is 'DISABLED' or 'FAULT_DISABLED', state tran-
sitions to 'FAULT_HOLD' will be redirected to
'FAULT DISABLED'.
Behavior of error output pin:
Chapter "5.2.2.5 Error output pin", page 52
TR9 Transition from 'FAULT_REACTION' to 'FAULT_HOLD'
(fault reaction successful).
Depending on enable signal and the enable behavior.
Chapter "5.2.2.4 Enable behavior", page 50
TR12 Transition from 'FAULT_REACTION' to
'FAULT_DISABLED' (fault reaction successful).
Depending on enable signal and the enable behavior.
Chapter "5.2.2.4 Enable behavior", page 50
TR13 Transition from 'FAULT_REACTION' to 'FAULT_INIT'
(fault reaction successful).
Depending on enable signal and the enable behavior.
Chapter "5.2.2.4 Enable behavior", page 50