Moog ACV with CANopen bus interface 7 Servo valve functions
Flow control
B99224-DV018-D-211, Rev. A, October 2018 218
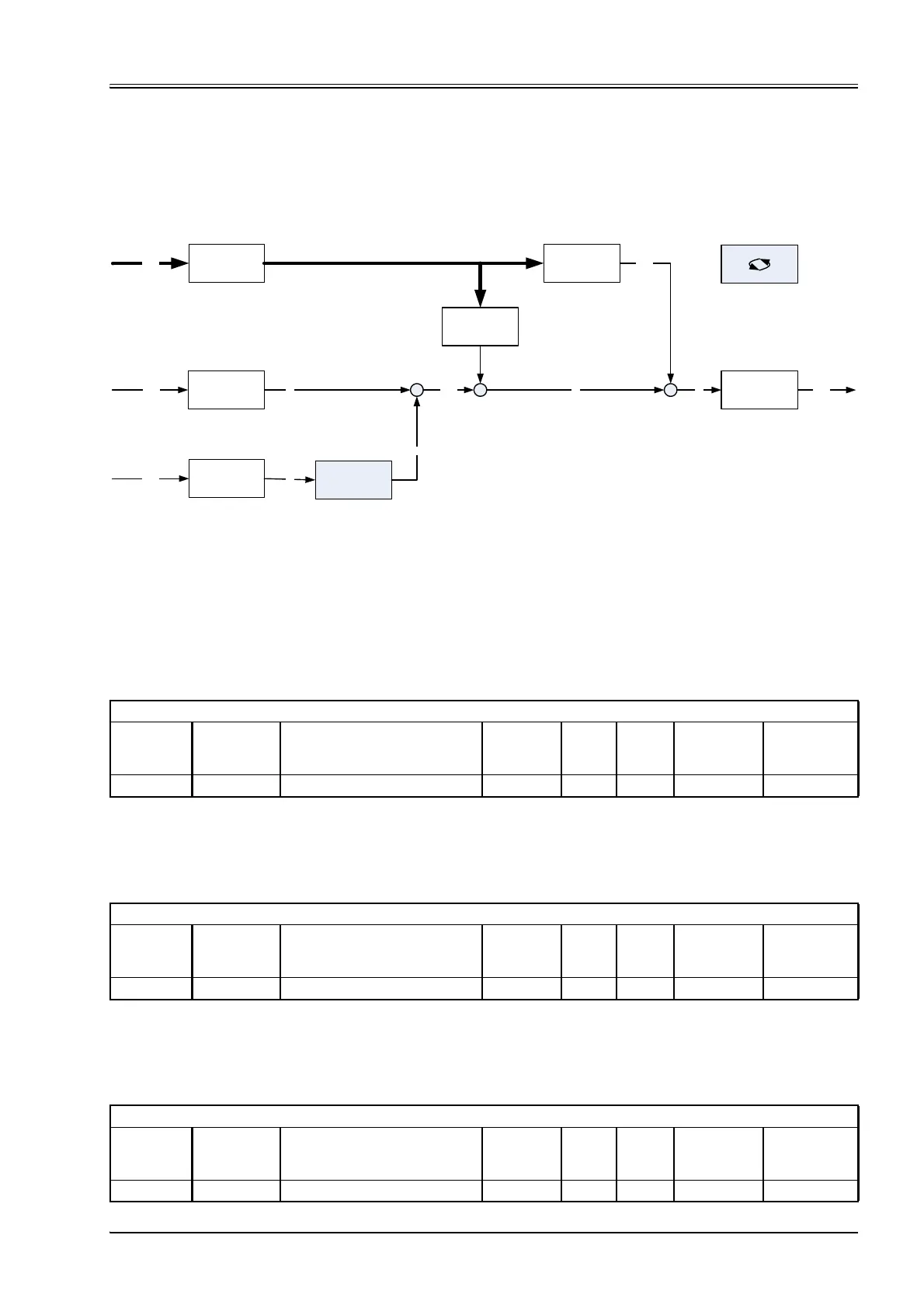
7.12 Flow control
The flow control mode is used to control the flow (and so the cylinder velocity) independent to the load (pres-
sure) on the cylinder. To reach this target, the non-linear influence of the pressure in the cylinder cambers is
compensated with the so called Bernoulli compensator.
Figure 130: Flow control
Chapter "7.10.2 Axis velocity actual value", page 210
7.12.1 Object 0x5213: Deviation value
This parameter holds the deviation between the flow demand filter value and the flow feedback value.
7.12.2 Object 0x5200: Bernoulli output
This parameter holds the Bernoulli output of the flow position controller.
7.12.3 Object 0x520F: Controller output
This parameter holds the controller output of the flow position controller.
Flow actual value
selection
#FlowDemandValue#
#FlowActualValue#
-
Flow demand value
scaling
<VelDemamdValue>
(0x5615)
Feedback axis
velocity proportional
element
Bernoulli
compensation
X
#KpOutput#
#Flow#
<BernulliOutput>
(0x5200)
#ControllerOutput#
<FlwControllerOutput>
(0x520F)
Pressure transducer
selection
<ActualValue1...8>
(0x6110...0x6117)
Leakage
compensation
<FlowDeviationValue>
(0x5213)
Signal limitation
Any signed 16/32 bit parameter
from the object dictionary
Sample frequency
Chapter 7.12.10
Chapter 7.10.8
Chapter 7.12.11
Chapter 7.5.10
Chapter 7.12.8
Chapter 7.12.9
ValveFlowControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5213 0 FlwDeviationValue INT16 ro - INT16 None
ValveFlowControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5200 0 BernoulliOutput INT16 ro - INT16 None
ValveFlowControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x520F 0 FlwControllerOutput INT16 ro - INT16 None