Moog ACV with CANopen bus interface 7 Servo valve functions
Axis position controller
B99224-DV018-D-211, Rev. A, October 2018 204
7.8.20.1 Object 0x5507: Acceleration feed forward proportional gain
This parameter contains the velocity feed forward gain.
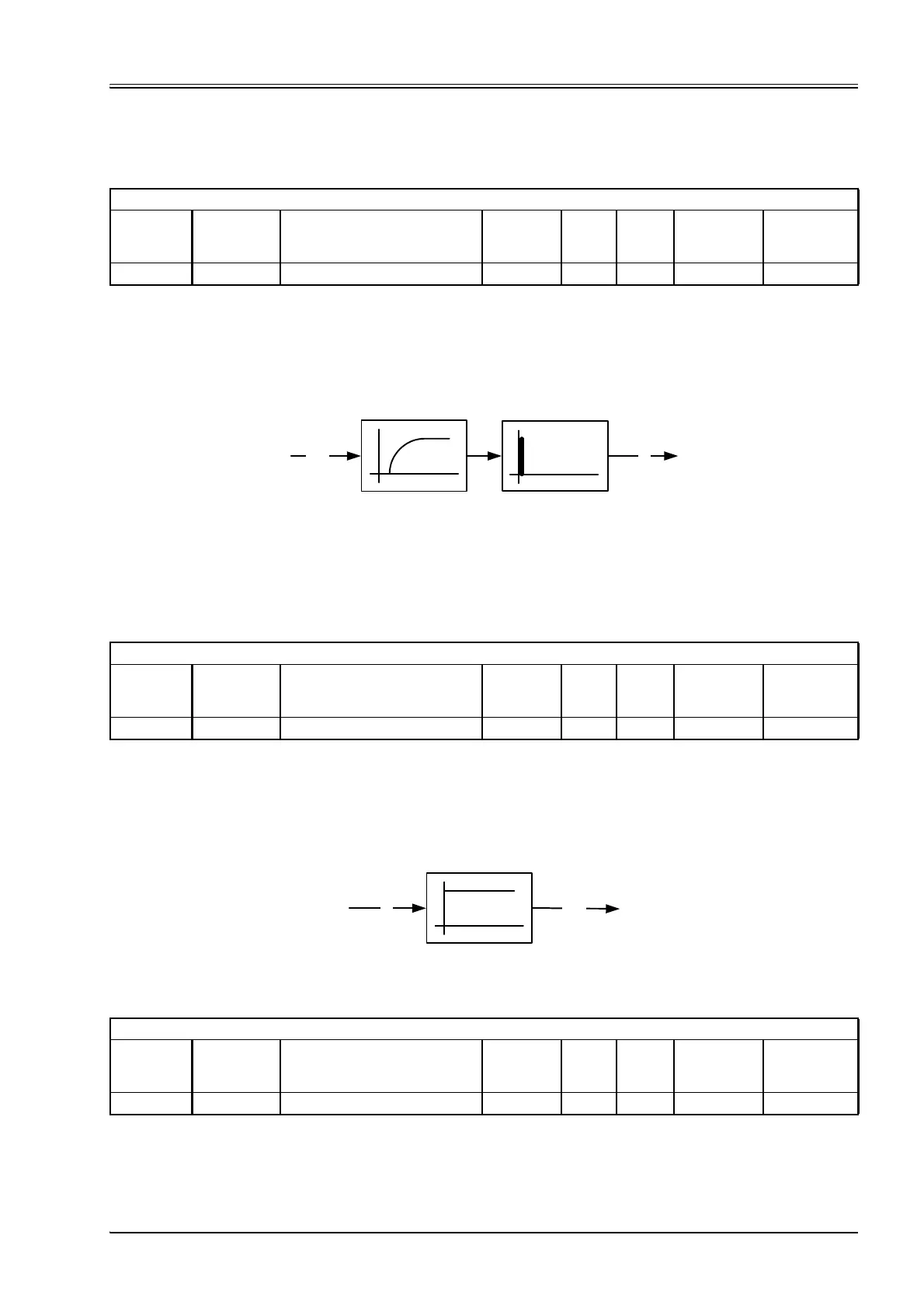
7.8.21 State feedback axis velocity and acceleration derivative elements
To realize a state space controller, the first derivation of the axis position values is necessary. To get a better
signal, the axis position value is filtered with a first order lag element.
Figure 109: State feedback axis velocity and acceleration derivative element
7.8.21.1 Object 0x550C: Actual value filter time constant
This parameter sets the time constant in seconds of the first order lag filter (PT1).
7.8.21.2 Object 0x550B: State feedback axis velocity proportional gain
The first derivation of the axis position value multiplied with this gain will be added to the other parts of the
controller.
Figure 110: State feedback axis velocity proportional gain
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5507 1 ProportionalGainKa FLOAT32 rw Y FLOAT32 0.0
<PosActualValue1>
(0x6601)
#VelFeedBack#
<PosActualFilterTimeConstant>
(0x550C)
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x550C 1 PosActualFilterTimeConstant FLOAT32 rw Y 0.0…+inf 0.0
<ProportionalFeedBackGainKv>
(0x550B)
#VelFeedBack#
<VelFeedBackOutput>
(0x5530)
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x550B 1 ProportionalFeedBackGainKv FLOAT32 rw Y FLOAT32 0.0