Moog ACV with CANopen bus interface 7 Servo valve functions
Axis velocity controller
B99224-DV018-D-211, Rev. A, October 2018 212
7.10.2.7 Object 0x6501: Axis velocity actual value
The velocity controller needs the actual velocity <VelActualValue> (0x6501) of the hydraulic axis.
This actual velocity can be read in via the transducer interface from the encoder (if the encoder supports the
velocity signal) or the velocity can be calculated as the derivation of the actual position signal
<PosActualValue1> (0x6601). The parameter <VelActualPathMode> (0x5545) will switch between the two
variants.
Chapter "7.10.2 Axis velocity actual value", page 210
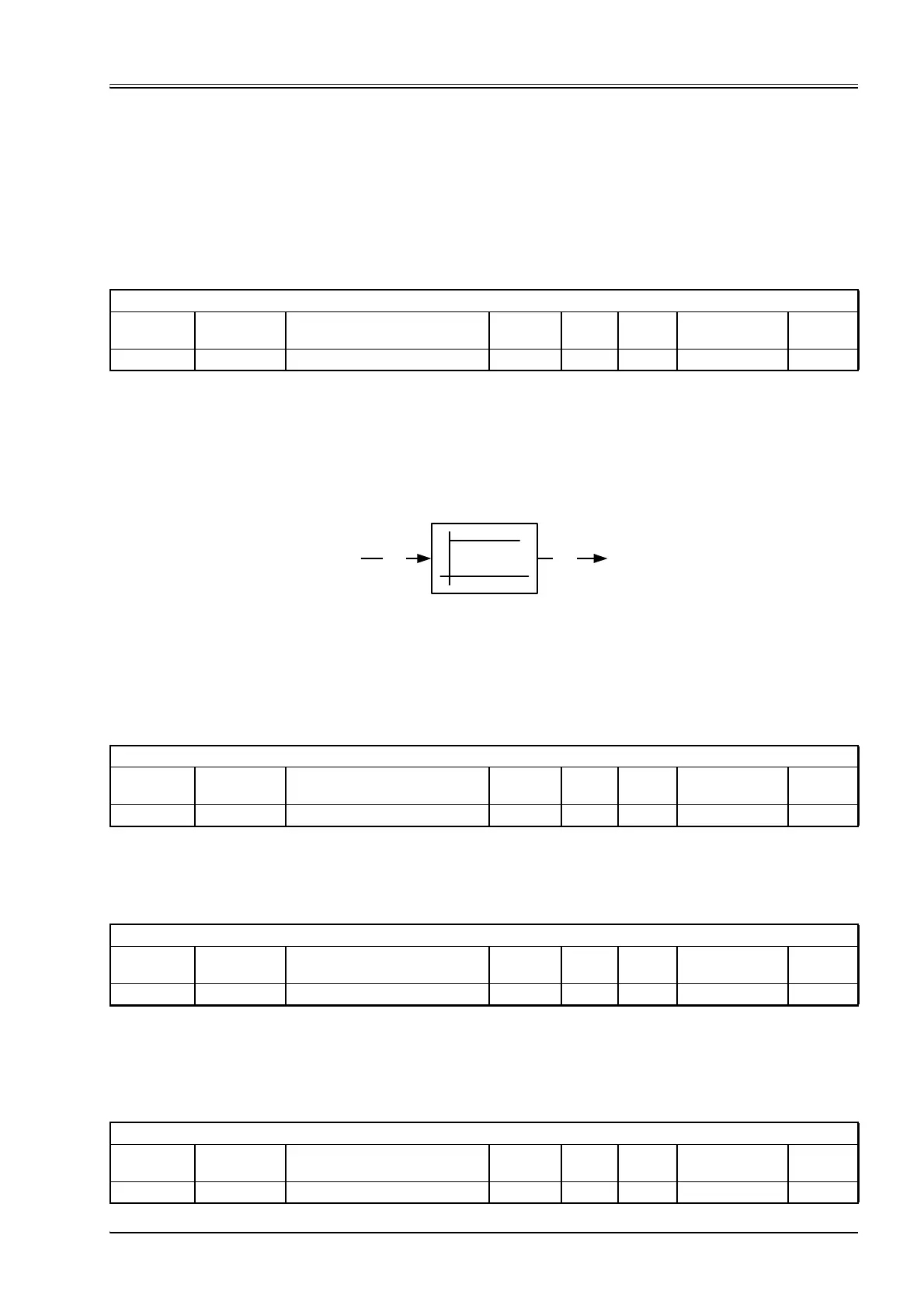
7.10.3 Axis velocity feed forward proportional element
To realize a feed forward control, the axis velocity demand value will be multiplied with this gain and added to
the other control elements.
Figure 122: Axis velocity feed forward proportional element
7.10.3.1 Object 0x5547: Velocity feed forward proportional gain
This parameter contains the velocity feed forward gain.
7.10.3.2 Object 0x5546: Velocity feed forward output
This parameter holds the output of the axis velocity feed forward proportional element.
7.10.3.3 Object 0x6550: Control deviation
This parameter holds the deviation between the axis velocity demand filter value and the axis velocity actual
value.
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x6501 0 VelActualValue INT32 ro - INT32 None
<ProportionalGainKv>
(0x5547)
<VelDemandFilterOutput>
(0x553B)
<VelFeedForwardOutput>
(0x5546)
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5547 1 ProportionalGainKv FLOAT32 rw Y FLOAT32 0.0
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5546 1 VelFeedForwardOutput FLOAT32 ro - FLOAT32 None
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x6550 0 VelDemandFilterOutput INT32 ro - INT32 None