Moog ACV with CANopen bus interface 7 Servo valve functions
Monitoring
B99224-DV018-D-211, Rev. A, October 2018 232
7.14.5 Object 0x570E: Axis velocity deviation window
The velocity deviation window is used to set bit 2 in the <AxisStatusWord> (0x561D).
Bit 2 is active while the velocity difference (|<ActualValue> (0x6501) – <VelocityLimit> (0x570E|) is less than
the <VelocityLimitWindow> (0x570D).
7.14.6 Object 0x5710: Pressure deviation window
The pressure deviation window is used to set bit 4 in the <AxisStatusWord> (0x561D).
Bit 4 is active while the absolute pressure difference (|<prsActualvalue> (0x6381) –
<PrsDemandValue> (0x6390)|) is less than the <PressureWindow> (0x5710).
7.14.7 Object 0x5711: Pressure actual value limit
The Pressure limit window used to set bit 6 in the <AxisStatusWord> (0x561D).
Bit 6 is active while the actual pressure <prsActualvalue> (0x6381) is greater than the
<MaximumPressureWindow> (0x5711).
7.15 Monitoring
The control deviation monitoring is only active if the associated controller is active. In p/Q mode, the
<ControlMode> (0x6043) is set to 5 (p/Q controller), the effective deviation monitoring depends on the active
controller indicated by the bit 8 (pressure controller effective) of the <StatusWord> (0x6041).
Chapter "7.1.1 Object 0x6043: Control mode", page 128
Chapter "5.2.3 Object 0x6041: Status word", page 52
Drive
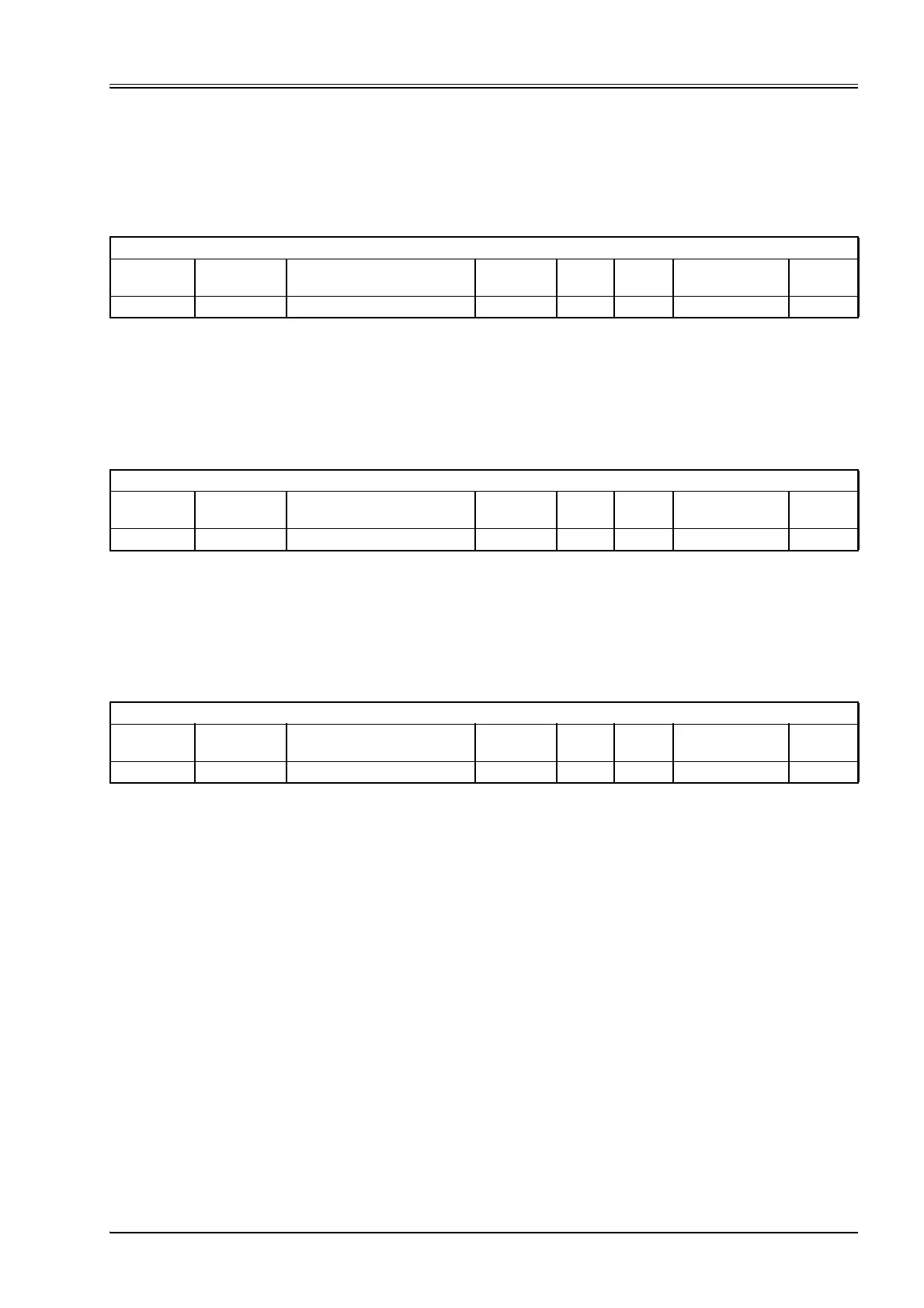
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x570E 0 VelocityLimit INT32 rw Y INT32 0
Drive
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5710 0 PressureWindow INT16 rw Y 0…32767 0
Drive
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5711 0 MaximumPressureWindow INT16 rw Y 0…32767 0