Moog ACV with CANopen bus interface 7 Servo valve functions
Axis position controller
B99224-DV018-D-211, Rev. A, October 2018 196
7.8.1 Object 0x6601: Actual value
The actual position of the position controller has to be mapped to the parameter
<PosActualValue1> (0x6601). It is possible to synchronize the hydraulic axis with up to 3 other axis.
The actual positions of these 3 axis are expected on the parameters <PosActualValue2...4> (0x6601). The
mapping of the actual positions to the interface outputs is done with the transducer interface numbers
<PosActualValueReference1...4> (0x6602).
7.8.2 Object 0x582B: Demand filter output
This parameter holds the output value of the demand filter element.
7.8.3 Object 0x6650: Control deviation
This parameter holds the deviation between the axis position demand filter value and the axis position actual
value.
7.8.4 Object 0x552A: Kp output
This parameter holds the output of the proportional element of the axis position controller.
7.8.5 Object 0x552A: Kp T1 output
This parameter holds the output of the proportional first order lag element of the axis position controller.
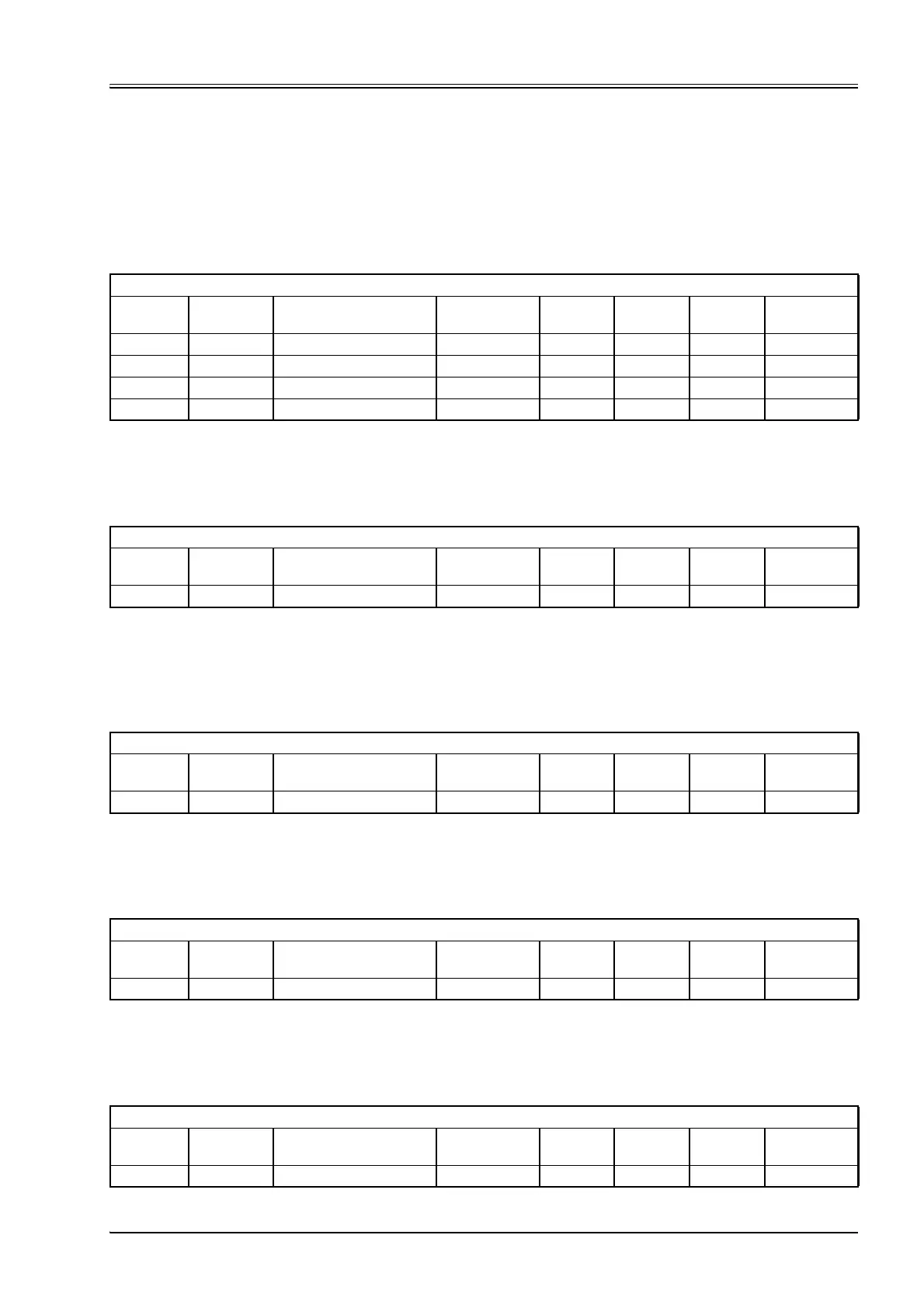
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x6601 1 PosActualValue1 INT32 ro - INT32 None
0x6601 2 PosActualValue2 INT32 ro - INT32 None
0x6601 3 PosActualValue3 INT32 ro - INT32 None
0x6601 4 PosActualValue4 INT32 ro - INT32 None
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x582B 0 PosDemandFilterOutput FLOAT32 ro - FLOAT32 None
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x6650 1 PosControlDeviation INT32 ro - INT32 None
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x552A 1 KpOutput FLOAT32 ro - FLOAT32 None
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x552A 2 KpT1Output FLOAT32 ro - FLOAT32 None