Moog ACV with CANopen bus interface 7 Servo valve functions
Pressure controller
B99224-DV018-D-211, Rev. A, October 2018 181
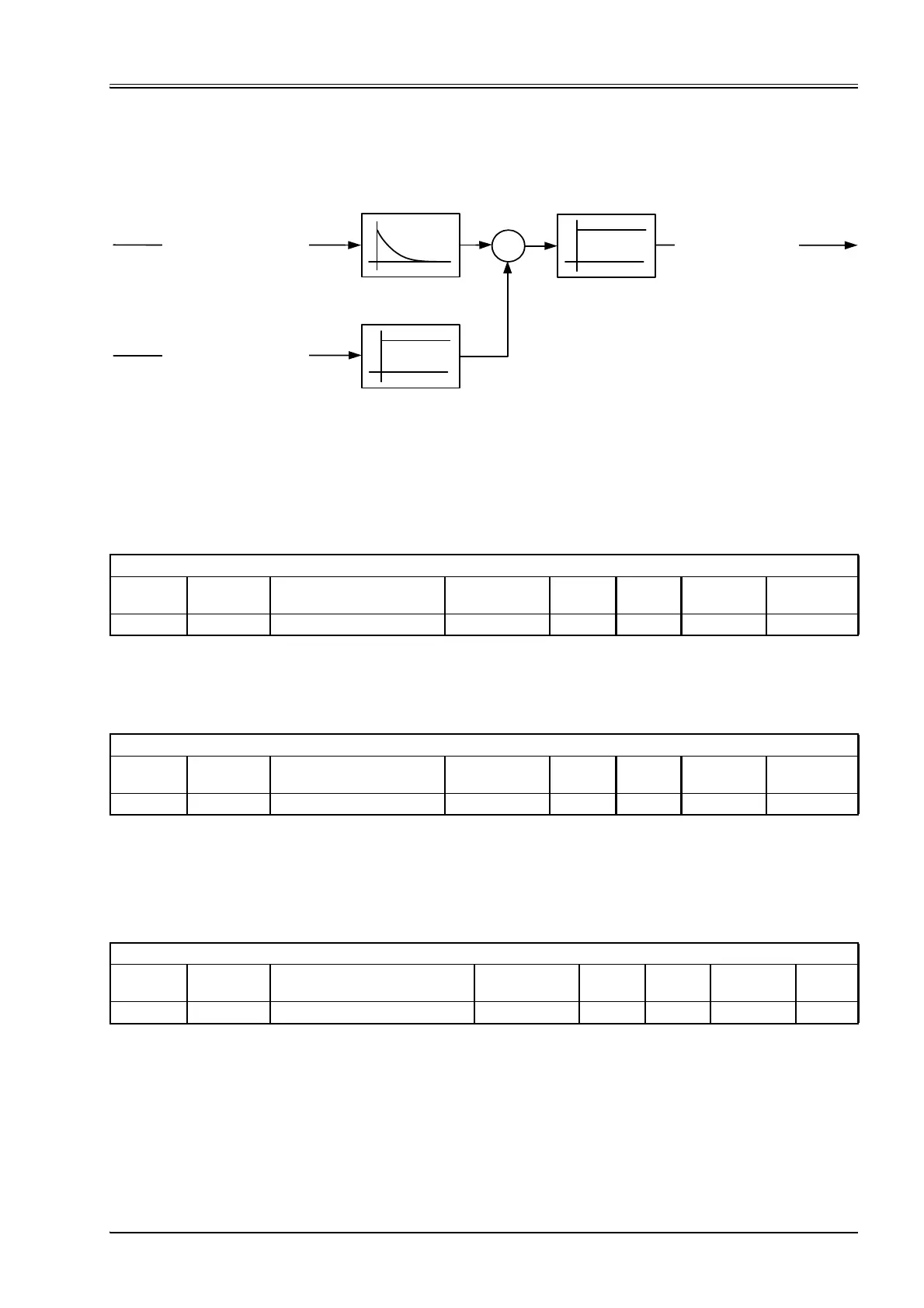
7.5.16 Feedback derivative element (PD)
This element differentiates the pressure actual value <PrsActualValue> (0x6381) with a real differentiator ele-
ment including a first order filter with a time constant T1. A gain element is below this differentiator.
Figure 87: Proportional derivative element 2 (PD)
7.5.16.1 Object 0x5863[N]: Differentiator gain 2
This parameter contains the gain of the second differentiator.
7.5.16.2 Object 0x5864[N]: Differentiator T1 2
This parameter contains the time constant of the first differentiator in seconds.
7.5.16.3 Object 0x5858N]: Spool Position Feed Forward Gain_2
This gain controls the influence of the spool position to the feedback derivative element (PD).
f(x)
<DifferentiatorT1_2>
(0x5864[N])
<SpoolPositionFeedForwardGain_2>
(0x5858[N])
<DifferentiatorGain_2>
(0x5863[N])
<SplActualValue>
(0x6301)
<kdFeedbackOutput>
(0x5862)
<PrsActualValue>
(0x6381)
ValvePressureControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5863 N=1…16 DifferentiatorGain_2 FLOAT32 rw Y –inf…+inf 0.0
ValvePressureControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5864 N=1…16 DifferentiatorT1_2 FLOAT32 rw Y 0.0…+inf 0.0
ValvePressureControl
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5858 N=1…16 SpoolPositionFeedForwardGain_2 FLOAT32 rw Y 0.0…+inf 0.0