Moog ACV with CANopen bus interface 7 Servo valve functions
Axis position controller
B99224-DV018-D-211, Rev. A, October 2018 201
7.8.16.1 Object 0x5501: Proportional gain
This object contains two proportional gain parameters. <ProportionalGainKp> (0x5501) is the gain of the pro-
portional part and <ProportionalGainKpT1> (0x5501) is the gain of the first order lag element.
7.8.16.2 Object 0x5508: Time constant
This parameter sets the time constant in seconds of the first order lag element (PT1).
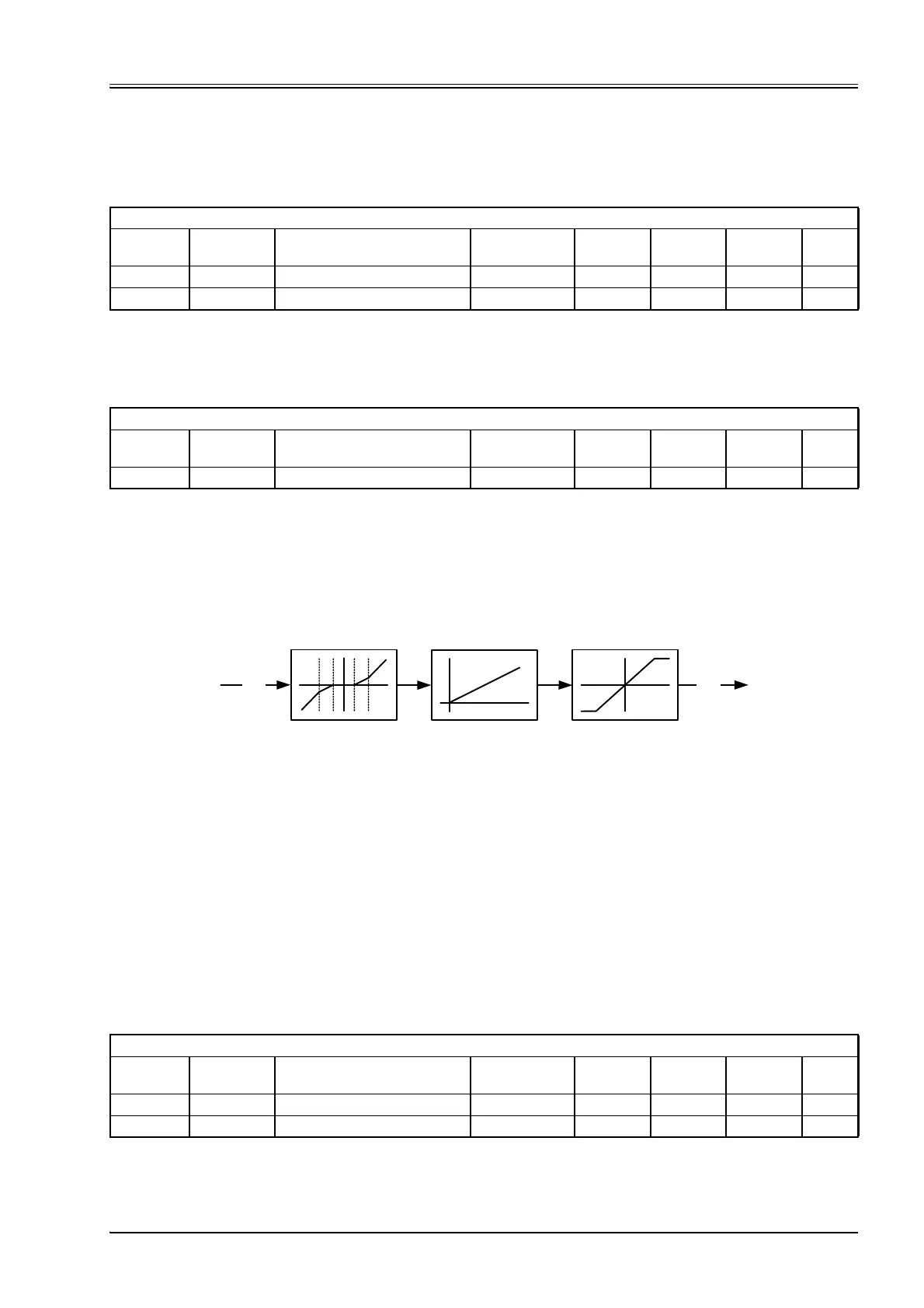
7.8.17 Integral element
The integral element is composed of an input depending gain, the integrator and a limiter.
Figure 105: Integral element
7.8.17.1 Object 0x5504: Integral gain
The gain of the integral part depends on the value of the absolute input signal |Input|.
Output = <IntegralInnerGain> (0x5504) x Input
Output = <IntegralOuterGain> (0x5504) x Input
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x5501 1 ProportionalGainKp FLOAT32 rw Y FLOAT32 0.0
0x5501 2 ProportionalGainKpT1 FLOAT32 rw Y FLOAT32 0.0
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x5508 1 TimeConstantKpT FLOAT32 rw Y 0.0…+inf 0.0
<KiOutputt>
(0x552C)
<IntegratorLimit>
(0x5513)
<IntegratorLimit>
(0x5513)
<PosControlDeviation>
(0x6650)
<IntegratorInnerRange>
(0x5511)
<IntegratorInnerGain>
(0x5504)
<IntegratorOuterRange>
(0x5505)
<IntegratorOuterGain>
(0x5504)
Zero range: |Input| less than <IntegralInnerRange> (0x5511). Output = Zero.
Inner range: |Input| between <IntegralInnerRange> (0x5511) and <IntegralOuterRange> (0x5505).
Outer range: |Input| greater than <IntegralOuterRange> (0x5505).
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x5504 1 IntegralInnerGain FLOAT32 rw Y FLOAT32 0.0
0x5504 2 IntegralOuterGain FLOAT32 rw Y FLOAT32 0.0