Moog ACV with CANopen bus interface 6 Signal routing and scaling
Setpoint value path
B99224-DV018-D-211, Rev. A, October 2018 67
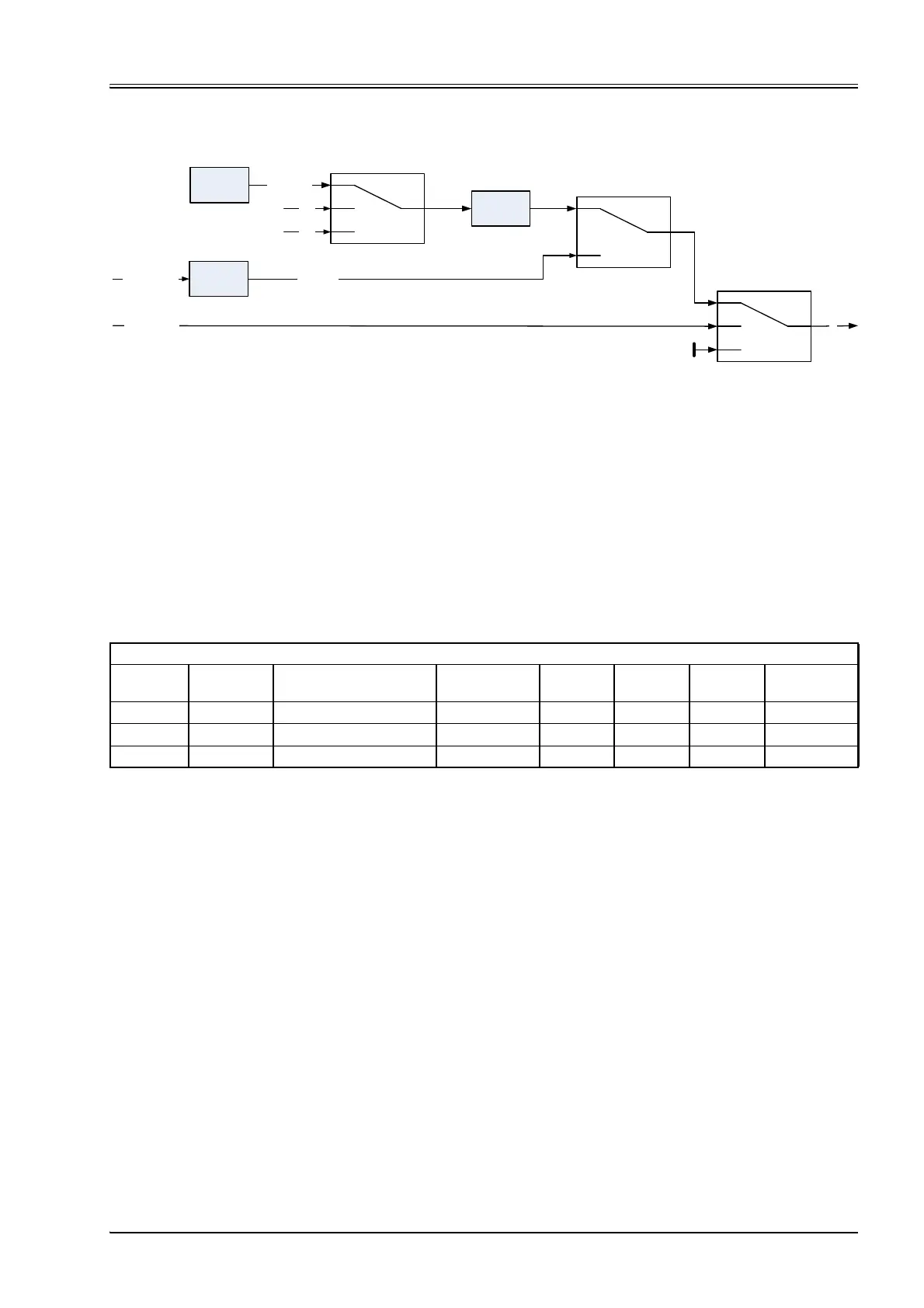
6.2.6 Axis velocity setpoint value path
Figure 26: Axis velocity setpoint value path
6.2.6.1 Object 0x6500: Setpoint
This parameter contains the axis velocity setpoint value which is received from the field bus. Depending on
the <DeviceMode> (0x6042), this parameter is in effect only for the <ControlMode> (0x6043) = 6 (axis veloc-
ity control).
Chapter "7.1.1 Object 0x6043: Control mode", page 128
The setpoint value takes only effect in case the <StatusWord> (0x6041) is 1111
b
('ACTIVE') and the
<DeviceMode> (0x6042) is set to 1 (setpoint input via bus).
Chapter "5.2.3 Object 0x6041: Status word", page 52
Chapter "6.2.1 Object 0x6042: Device mode", page 58
Chapter "2.4.3 Units and prefix parameter", page 12
<VelSetpoint>
velset (0x6500)
<VelSetpoint>
(0x6500)
#AxesVelocitySetpoint#
<StatusWord>
(0x6041)
’ACTIVE’
’HOLD’ or
’FAULT HOLD’
’INIT’ or ’DISABLED’ or
’FAULT DISABLED’
<PosSetpointParameter>
(0x5520)
0x65000120
0x...
0x...
<...>
(0x...)
<...>
(0x...)
Object 0x1600:
RxPDO mapping
Axis velocity
setpoint value from
field bus
Scaling
16 bit -> 32 bit
Any signed
16 or 32 bit
param. from the
object dictionary
<VelHoldSetpoint>
(0x5527)
1 (Setpoint input via the bus)
2 (Setpoint input locally)
<DeviceMode>
(0x6042)
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x6500 1 VelSetpoint INT32 rw N INT32 None
0x6500 2 Unit UINT8 ro - UINT8 0
0x6500 3 Prefix INT8 ro - INT8 0