Moog ACV with CANopen bus interface 7 Servo valve functions
Axis velocity controller
B99224-DV018-D-211, Rev. A, October 2018 214
7.10.5.1 Object 0x5522: Integral gain
The gain of the integral part depends on the value of the absolute input signal |Input|.
Output = <IntegralInnerGain> (0x5522) x Input
Output = <IntegralOuterGain> (0x5522) x Input
7.10.5.2 Object 0x5517: Integral inner range
Border of the absolute input signal to switch between gain = 0.0 and gain = <IntegralInnerGain> (0x5522).
7.10.5.3 Object 0x5516: Integral outer range
Border of the absolute input signal to switch between gain = <IntegralInnerGain> (0x5522) and
gain = <IntegralOuterGain> (0x5522).
7.10.5.4 Object 0x5518: Integral limit
Limit of the output signal of the integral element.
Zero range: |Input| less than <IntegralInnerRange> (0x5517). Output = Zero.
Inner range: |Input| between <IntegralInnerRange> (0x5517) and <IntegralOuterRange> (0x5516).
Outer range: |Input| greater than <IntegralOuterRange> (0x5516).
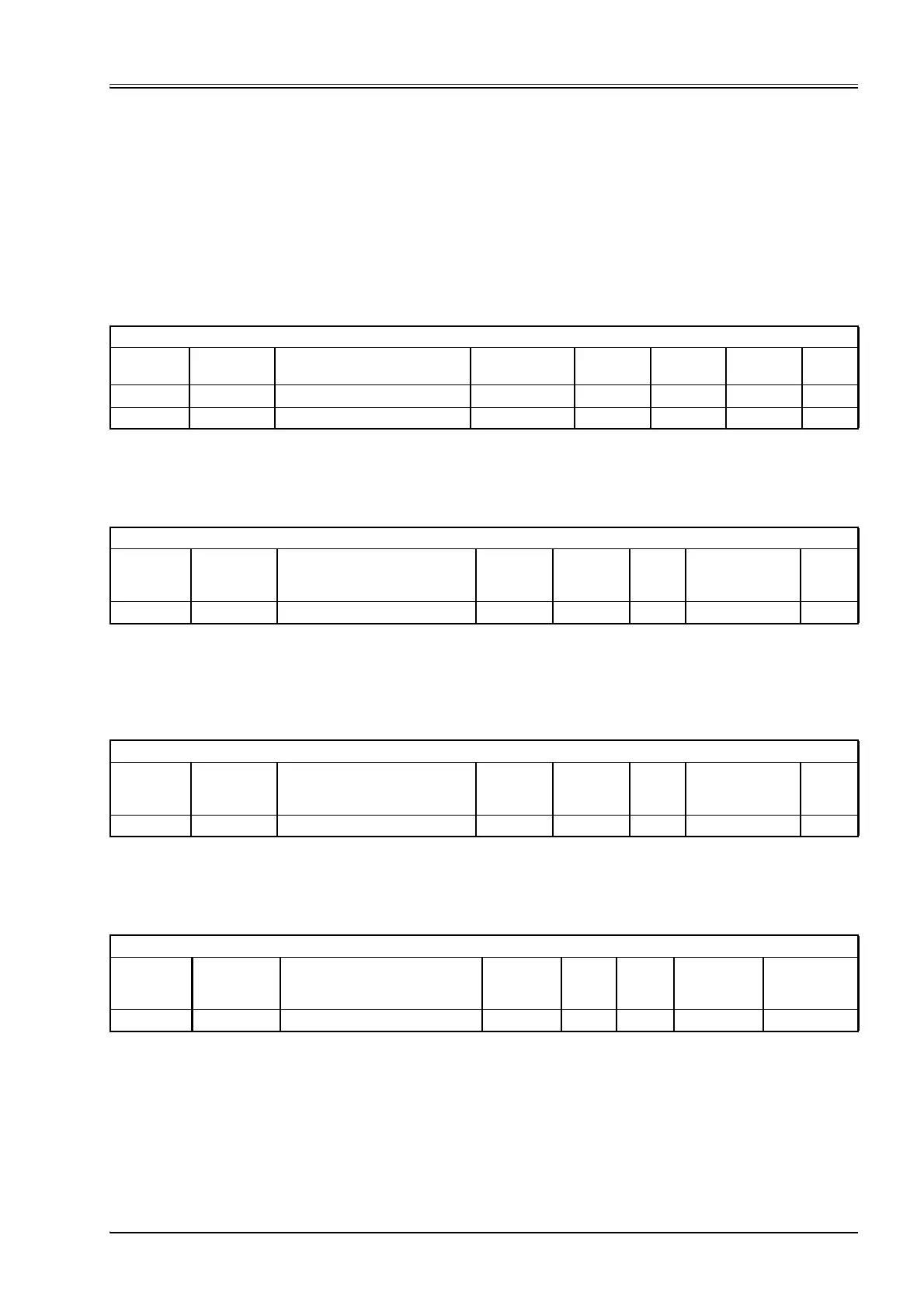
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x5522 1 IntegralInnerGain FLOAT32 rw Y FLOAT32 0.0
0x5522 2 IntegralOuterGain FLOAT32 rw Y FLOAT32 0.0
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5517 1 IntegralInnerRange FLOAT32 rw Y 0.0…2147483647 0.0
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5516 1 IntegralOuterRange FLOAT32 rw Y 0.0…2147483647 0.0
DriveVelocityControl
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5518 1 IntegralLimit FLOAT32 rw Y 0…+inf 16384000000