Moog ACV with CANopen bus interface 7 Servo valve functions
Axis position controller
B99224-DV018-D-211, Rev. A, October 2018 195
7.7.6 Axis position manual movement
In the <DeviceMode> (0x6042) = 3 (install mode) or = 4 (reference mode), the hydraulic axis can be moved
manually using the trajectory generator. The axis can be moved in positive direction with bit 9 or in negative
direction with bit 10 of the <ControlWord> (0x6040). If an incremental encoder is used, then the
<DeviceMode> (0x6042) = 4 (reference mode) allows a homing position run using the Z pulse of the encoder.
The maximal velocity is limited with the parameter <ManualMaxSpeed> (0x5614).
Chapter "6.2.1 Object 0x6042: Device mode", page 58
Chapter "5.1.2 Object 0x6040: Control word", page 44
Chapter "6.6.4 Incremental Encoder", page 96
Chapter "7.7 Axis position setpoint conditioning / demand value generator", page 191
7.7.6.1 Object 0x5614: Manual maximum speed
This maximum speed limits the manual velocity in <DeviceMode> (0x6042) = 3 (install mode) or = 4 (refer-
ence mode).
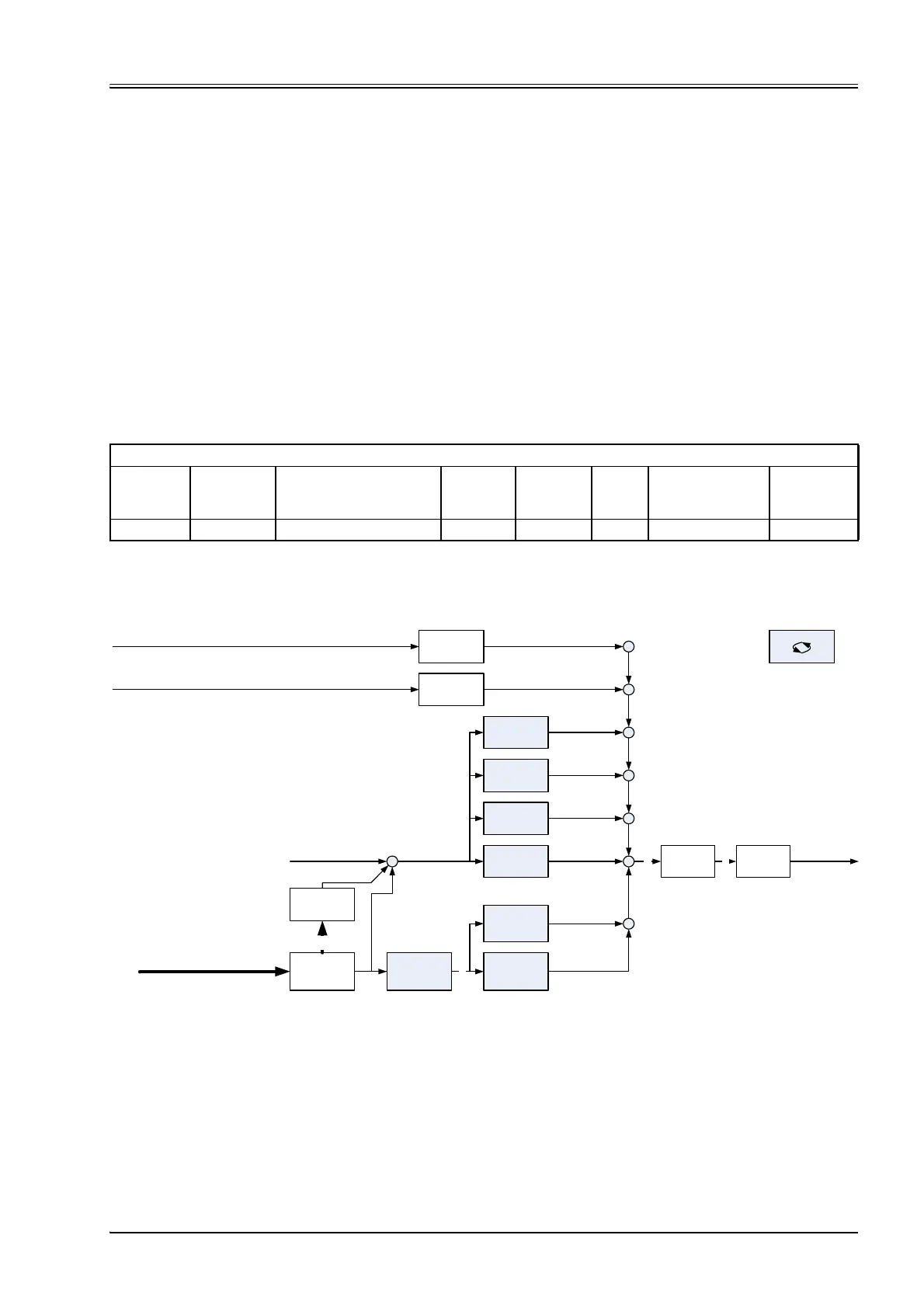
7.8 Axis position controller
Figure 101: Axis position controller
DrivePositionControl_DemandValueGenerator
Index Sub-index Parameter name Data type Access
Per-
sis-
tence Value range Default
0x5614 0 ManualMaxSpeed INT32 rw Y 1000...2147483647 1000
Axis position
synchronisation
Axis position
transducer selection
Proportional element
State feedback axis
velocity derivative
element
State feedback axis
velocity proportional
element
Integral element
Derivative element
Proportional first
order lag element
State feedback axis
acceleration
derivative element
Axis velocity
feedforward
proportional element
Axis acceleration
feedforward
proportional element
#VelFeedBack#
Directional
depending gain
Signal limitation
#ControllerOutput1#
#ControllerOutput2#
<PosActualValue2...4>
(0x6601)
-
-
Sample frequency
<KpOutput>
(0x552A)
<KpT1Output>
(0x552A)
<KiOutput>
(0x552C)
<KdOutput>
(0x552B)
<AccFeedForwardOutput>
(0x552F)
<VelFeedForwardOutput>
(0x552E)
<PosAccDemandValue>
(0x5616)
<PosVelDemandValue>
(0x561E)
<VelFeedBackOutput>
(0x5530)
<AccFeedBackOutput>
(0x5531)
#Synchronisation#
<PosDemandValue>
(0x6610)
<ActualValue1...8>
(0x6210...0x6217)
<PosActualValue1>
(0x6601)
<PosControlDeviation>
(0x6650)
<PosControllerOutput>
(0x550F)
Chapter 7.8.16
Chapter 7.8.16
Chapter 7.8.17
Chapter 7.8.18
Chapter 7.8.19
Chapter 7.8.21
Chapter 7.8.21
Chapter 7.8.15
Chapter 7.8.14