Moog ACV with CANopen bus interface 7 Servo valve functions
Axis position setpoint conditioning / demand value generator
B99224-DV018-D-211, Rev. A, October 2018 194
7.7.4.1 Object 0x5700: Trajectory type
If <TractoryType> = 0 then the trajectory generator is switched off.
If <TractoryType> = 1 then the trajectory generator is enabled while the device state machine is in the
'ACTIVE' state.
If <TractoryType> = 2 then the trajectory generator is enabled while the device state machine is in the 'HOLD'
or 'ACTIVE' state.
7.7.4.2 Object 0x5703: Maximum velocity
This parameter limits the maximal velocity of the axis.
7.7.4.3 Object 0x5702: Maximum acceleration
This parameter limits the maximal acceleration of the axis.
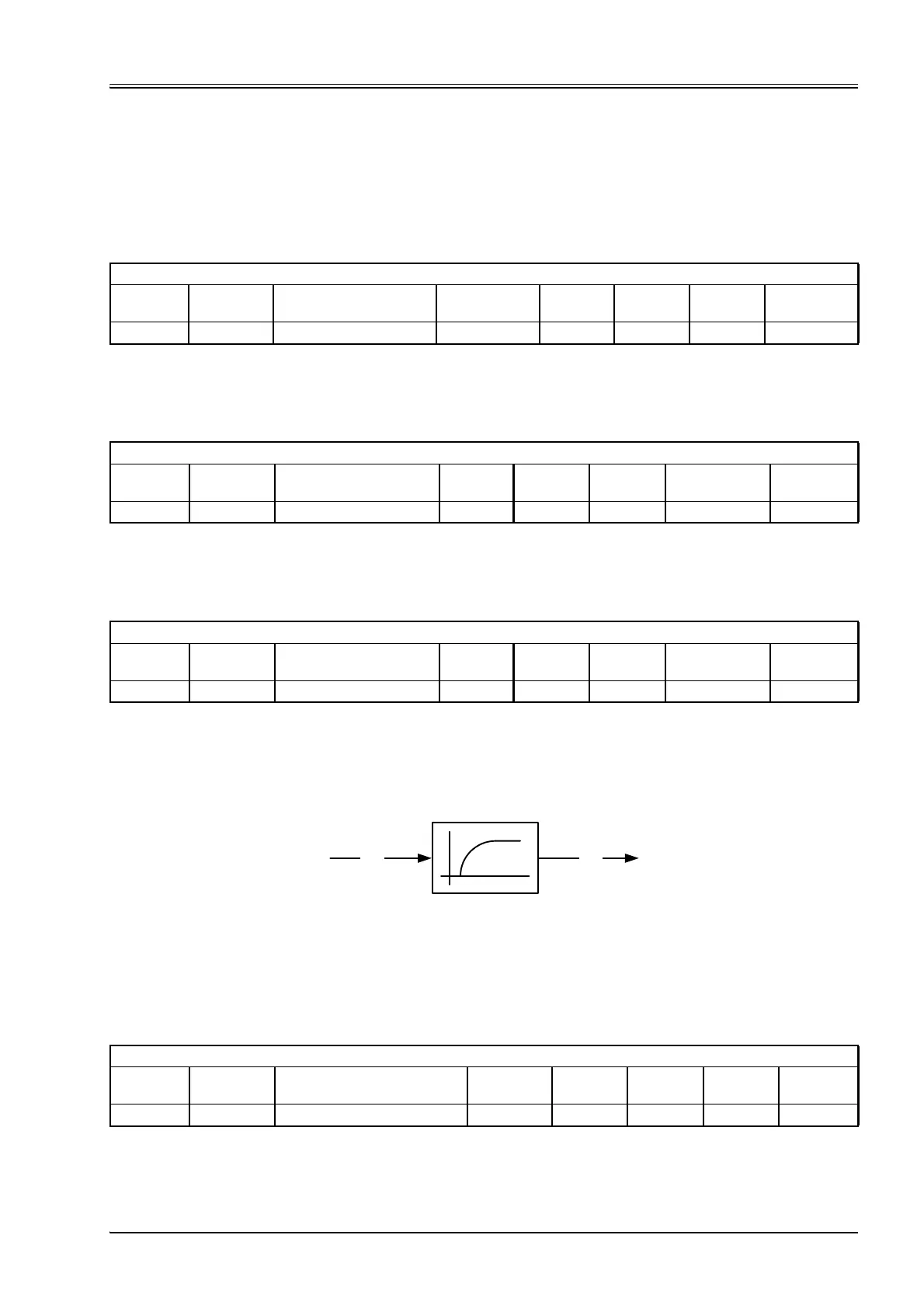
7.7.5 Axis position demand value filter
This first order lag element (PT1) is used to filter the axis position demand value.
Figure 100: Axis position demand value filter
7.7.5.1 Object 0x582A: Demand value filter time constant
This parameter sets the time constant in seconds of the first order lag element (PT1).
DrivePositionControl_DemandValueGenerator
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x5700 0 TractoryType INT8 rw Y 0…2 0
DrivePositionControl_DemandValueGenerator
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5703 0 MaximumVelocity INT32 rw Y 0…2147483647 100000
DrivePositionControl_DemandValueGenerator
Index Sub-index Parameter name Data type Access
Per-
sistence Value range Default
0x5702 0 MaximumAcceleration INT32 rw Y 0…2147483647 100000
<PosDemandFilterTimeConstant>
(0x582A)
<PosDemamdValue>
(0x6610)
<FilterOutput>
(0x582B)
DrivePositionControl
Index Sub-index Parameter name Data type Access
Per-
sistence
Value
range Default
0x582A 0 PosDemandFilterTimeConstant FLOAT32 rw Y 0…+inf 0.0