6 Operating modes
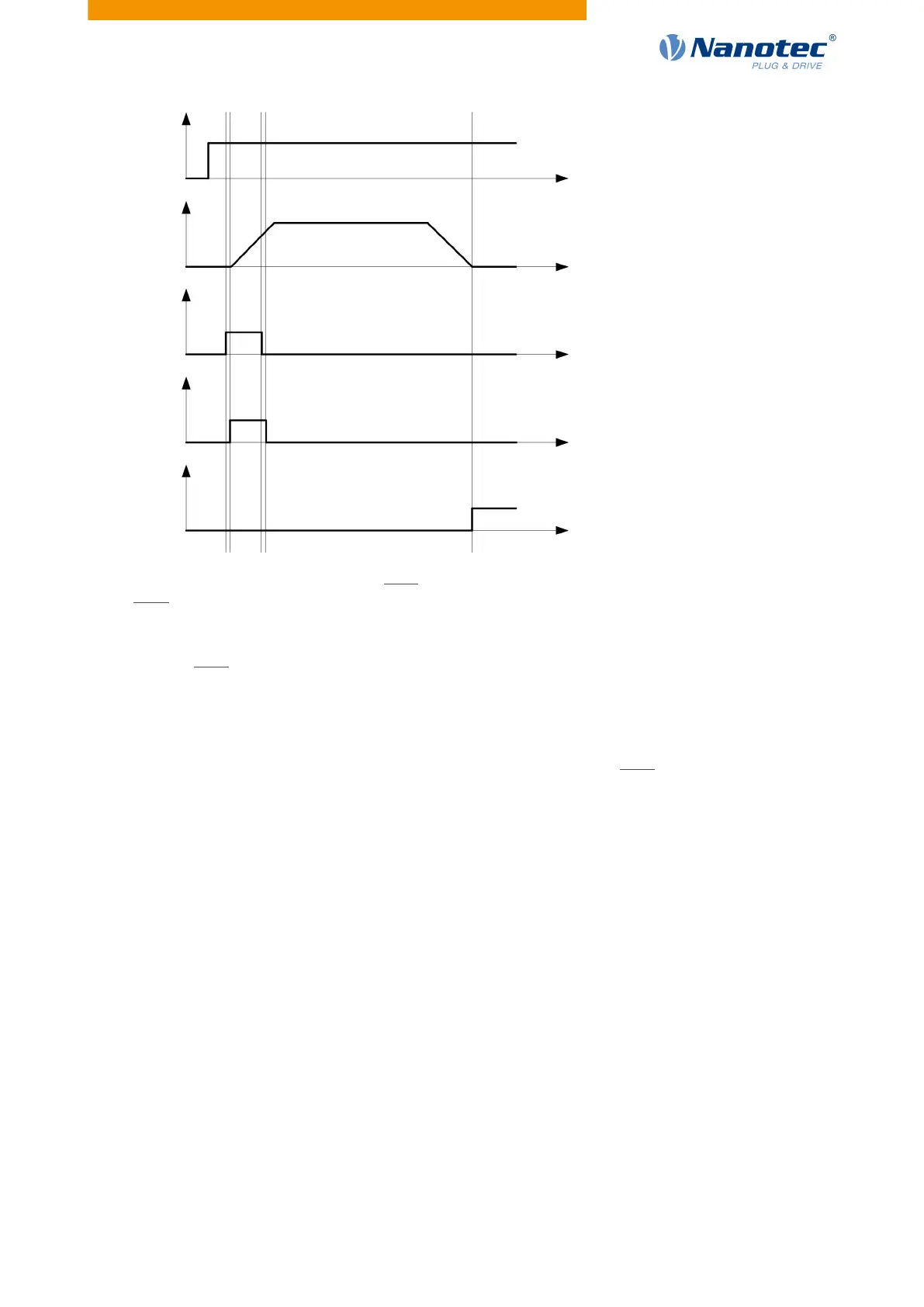
Destination point
(607A
h
)
Actual
Speed
New destination
point
(6040
h
, Bit 4)
Destination point
confirmation
(6041
h
, Bit 12)
Destination point
reached
(6041
h
, Bit 10)
t
t
t
t
t
The controller can also reset bit 4 in object 6040
h
(controlword) on its own. This is set with bits 4 and 5 of
object 60F2
h
.
6.1.3.2 Other travel commands
Bit 12 in object 6041
h
(statusword, set-point acknowledge) changes to "0" if another travel command can be
buffered (see time 1 in the following figure). As long as a target position is being moved to, a second target
position can be passed to the controller in preparation. All parameters – such as speed, acceleration, braking
deceleration, etc. – can thereby be reset (time 2). If the buffer is empty, the next time can be queued up
(time 3).
If the buffer is already full, a new set point is ignored (time 4). If bit 5 in object 6040
h
(controlword, bit:
"Change Set-Point Immediately") is set, the controller operates without the buffer; new travel commands are
implemented directly (time 5).
Version: 2.0.1 / FIR-v1650 49