6 Operating modes
Destination point
(607A
h
)
Actual
Speed
New destination
point
(6040
h
, Bit 4)
Destination point
confirmation
(6041
h
, Bit 12)
Destination point
reached
(6041
h
, Bit 10)
t
t
t
t
t
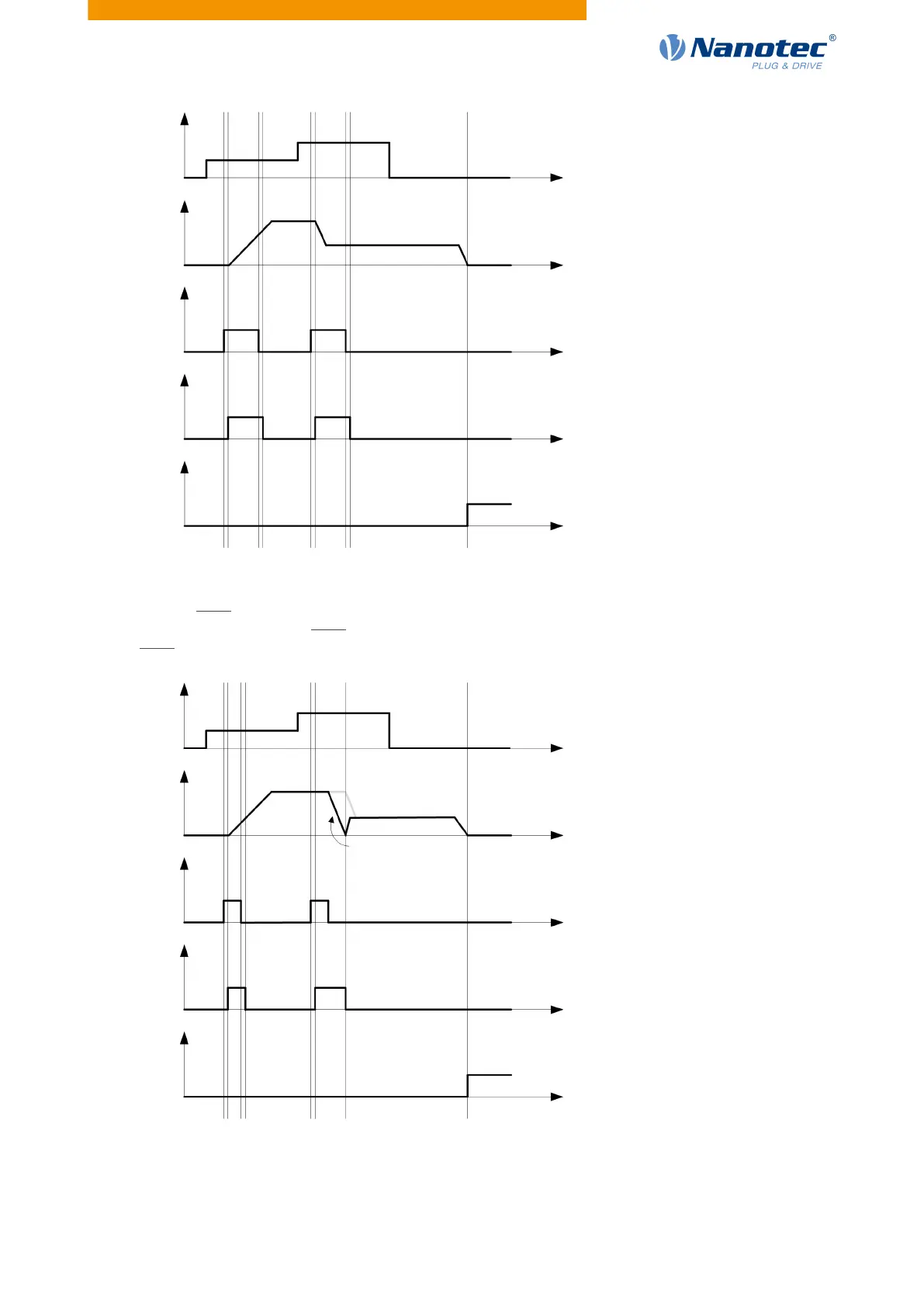
Possibilities for moving to a target position
If bit 9 in object 6040
h
(controlword) is equal to "0", the current target position is first moved to completely.
In this example, the final speed (6082
h
) of the target position is equal to zero. If bit 9 is set to "1", the profile
speed (6081
h
) is maintained until the target position is reached; only then do the new boundary conditions
apply.
Destination point
(607A
h
)
Actual
Speed
New destination
point
(6040
h
, Bit 4)
6040
h
Bit 9 = 1
6040
h
Bit 9 = 0
Destination point
confirmation
(6041
h
, Bit 12)
Destination point
reached
(6041
h
, Bit 10)
t
t
t
t
t
Possible combinations of travel commands
To provide a better overview of the travel commands, combinations of travel commands are listed and
depicted in this chapter.
Version: 2.0.1 / FIR-v1650 51