Enable Status
ErrorID
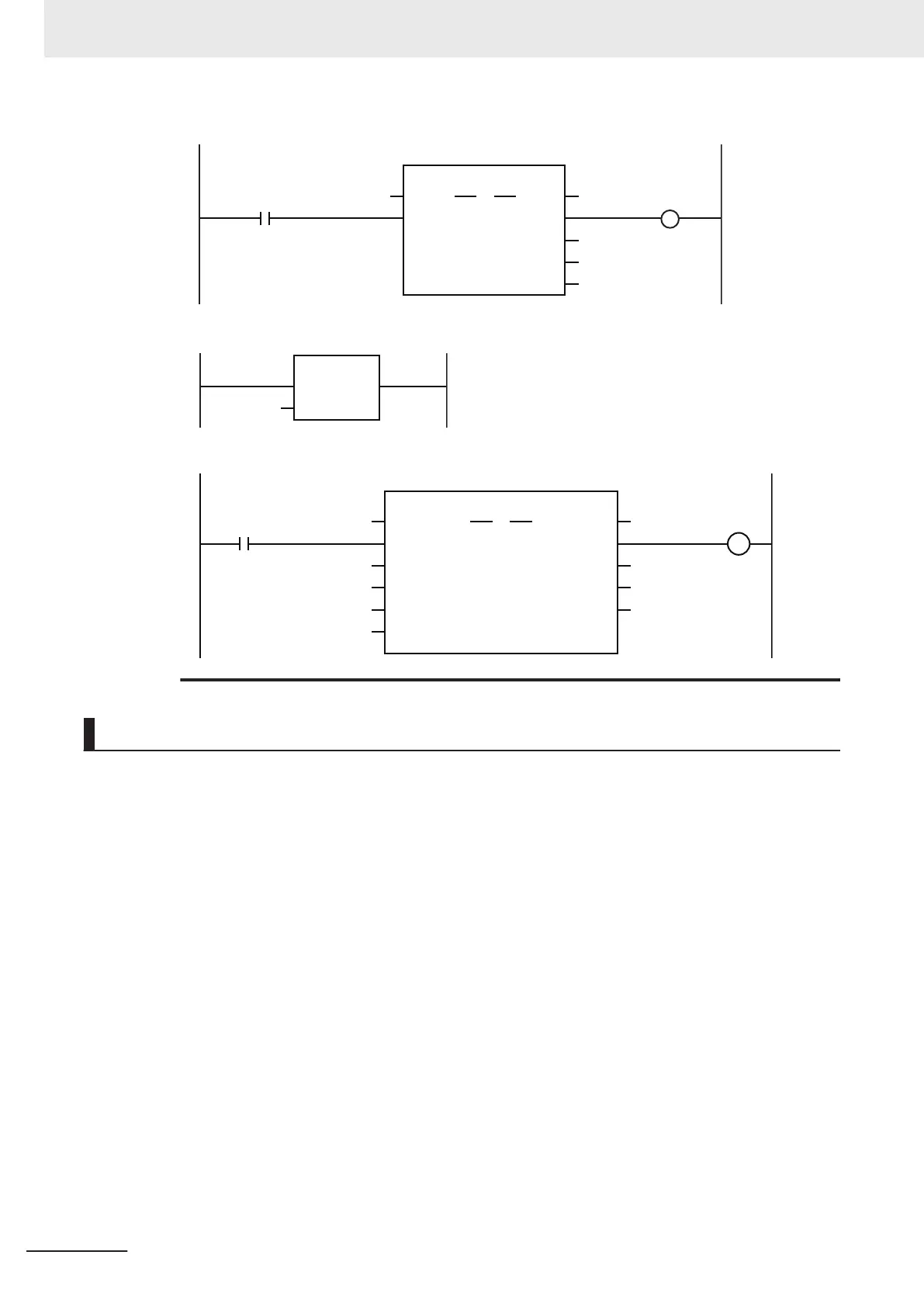
PWR1
Error
MC_P
ower
Axis Axis
Busy
MC_Axis000
Pwr1_En
Pwr1_Status
Pwr1_Bsy
Pwr1_Err
Pwr1_ErrID
Servo turned ON.
MCNo
MCR
In
0
Master control ended.
PositiveEnable
ErrorID
MC_Mo
veJog_instance
Error
MC_MoveJog
Axis Axis
Busy
CommandAbortedNegativeEnable
V
elocity
Acceleration
Deceleration
MC_Axis000
POS_EN
NEGA_EN
J_ERRID
VEL
ACC
DEC
J_CA
J_ERR
J_DONE
MC_MoveJog Instruction
Timing Charts
• Busy (Executing) changes to TRUE as soon as PositiveEnable (Positive Direction Enable) or
NegativeEnable (Negative Direction Enable) changes to TRUE.
•
The axis starts deceleration as soon as PositiveEnable (Positive Direction Enable) or
NegativeEnable (Negative Direction Enable) changes to FALSE. Busy (Executing) changes to
FALSE when the axis stops completely.
• If another instruction aborts this instruction, CommandAborted changes to TRUE and Busy (Execut-
ing) changes to FALSE.
3 Axis Command Instructions
3-12
NY-series Motion Control Instructions Reference Manual (W561)