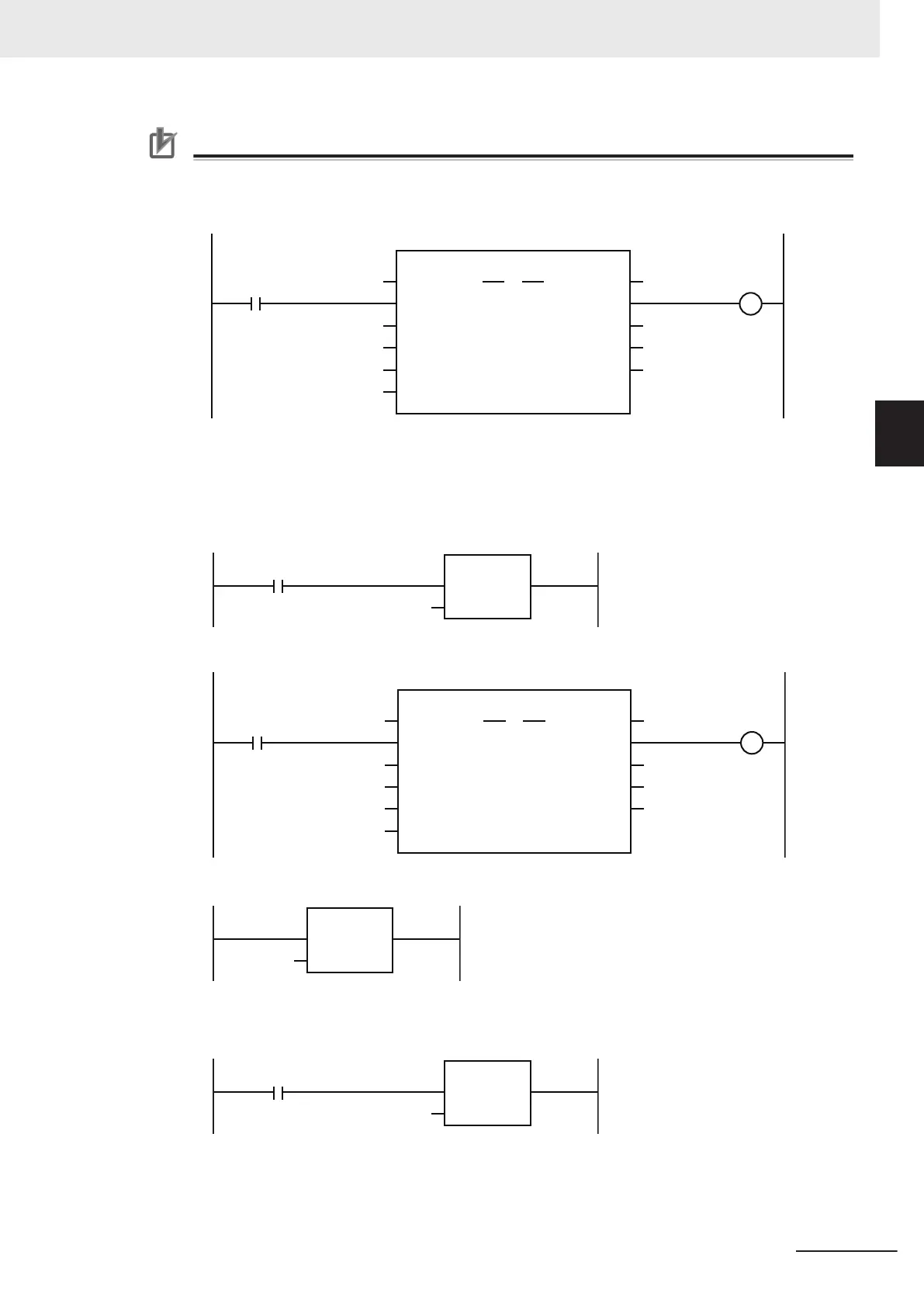
Precautions for Correct Use
• When creating a ladder diagram program, you must connect the PositiveEnable (Positive Di-
rection Enable) input variable to the left bus bar and specify a variable for the NegativeEnable
(Negative Direction Enable) input variable as shown below
.
Positiv
eEnable
ErrorID
MC_MoveJog_instance
Error
MC_MoveJog
Axis Axis
Busy
CommandAbort
ed
NegativeEnable
V
elocity
Acceleration
Deceleration
MC_Axis000
POS_EN
NEGA_EN
J_ERRID
VEL
ACC
DEC
J_CA
J_ERR
J_DONE
To use the master control instructions (MC and MCR) for the MC_MoveJog (Jog) instruction,
do not program the instructions as shown below
. If you do, master control is applied only to
PositiveEnable (Positive Direction Enable), i.e., it is not applied to NegativeEnable (Negative
Direction Enable).
MC_On
MCNo
MC
In
0
Master control started.
PositiveEnable
ErrorID
MC_Mo
veJog_instance
Error
MC_MoveJog
Axis Axis
Busy
CommandAbortedNegativeEnable
V
elocity
Acceleration
Deceleration
MC_Axis000
POS_EN
NEGA_EN
J_ERRID
VEL
ACC
DEC
J_CA
J_ERR
J_DONE
MC_MoveJog Instruction
MCNo
MCR
In
0
Master control ended.
Always use the master control instructions for the MC_Power instruction.
MC_On
MCNo
MC
In
0
Master control started.
3 Axis Command Instructions
3-11
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveJog
3
Function