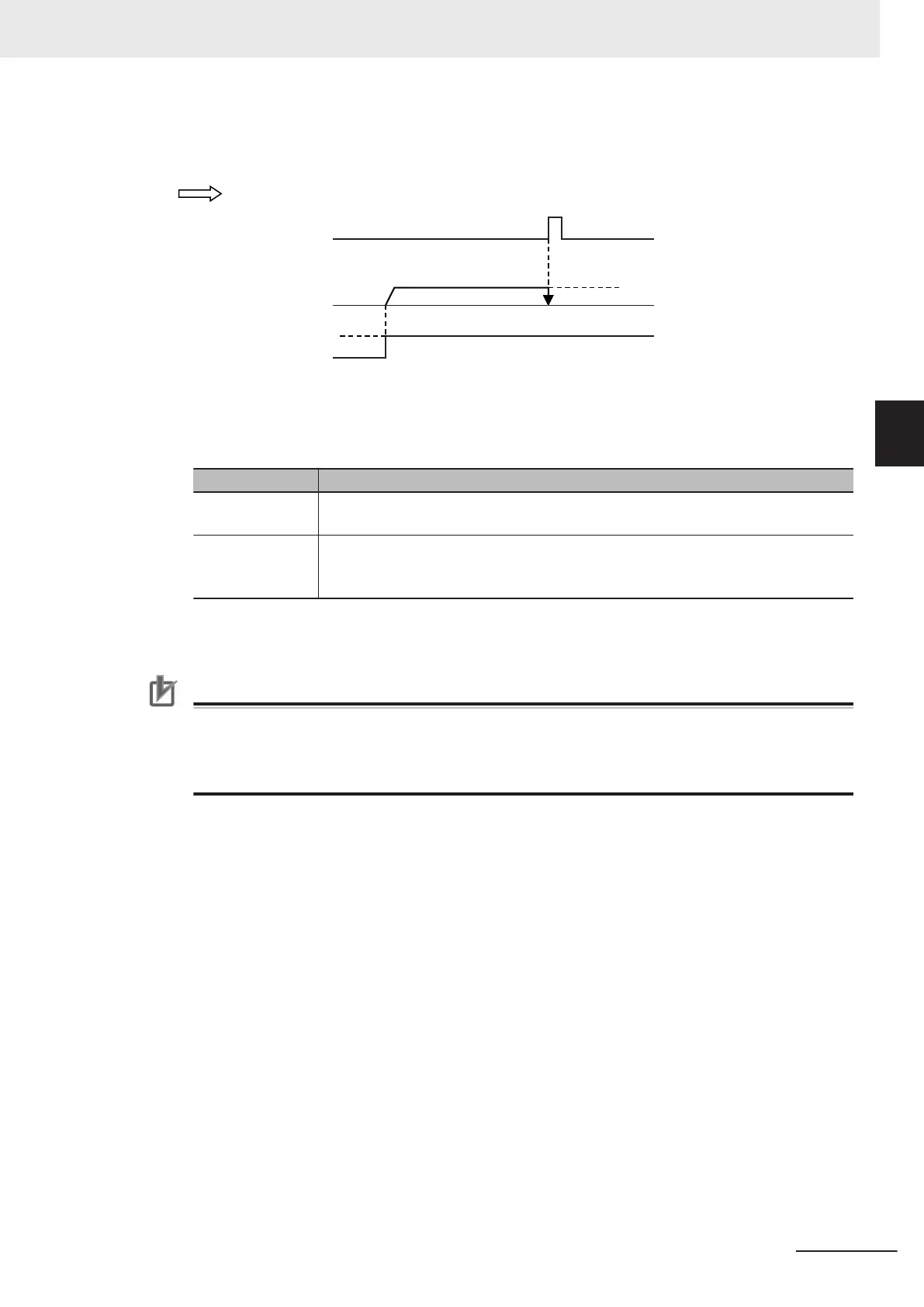
2 Home is defined when the home input turns ON.
Positive direction
Homing approach veloci
ty
Stops.
Start
Command torque from previous operation
Torque limit
Negative direction
Command output
Home input signal
Home input detection direction
ON
OFF
• Releasing the torque limit also differs between OMRON 1S-series as well as G5-series Servo
Drives and other Servo Drives.
Servo Drive Operation
1S-series, G5-
series
Automatically released when the axis moves in the direction opposite to homing for
the first time after homing.
Other Servo
Drives
If a torque limit is used, release the torque limit when the axis moves in the direction
opposite to homing for the first time after homing. Use the EC_CoESDOW
rite (CoE
SDO Write) instruction to change the torque limit.
• Home is also defined if the home input signal turns ON before the homing approach velocity is
reached after homing starts.
Precautions for Correct Use
For an OMRON G5-series Linear Motor Type Servo Drive with built-in EtherCAT communica-
tions, the Z-phase input cannot be mapped to a PDO. Therefore, if you use Homing Operation
Mode 13: No Home Proximity Input/Holding Home Input, which can use a Z-phase input
mapped to a PDO, do not select the Z-phase input for the home input signal.
14: Zero Position Preset Operation
The command current position is set to the home position offset to define home.
Also, the following error between the command current position and the actual position is retained.
3 Axis Command Instructions
3-33
NY-series Motion Control Instructions Reference Manual (W561)
MC_Home
3
Function