Error
ErrorID
Execute
Done
Busy
CommandAborted
16#0000
0
-2
5
3
Homing
Homed (Home Defined)
Command current position
Actual current position
Instruction Details
This section describes the instruction in detail.
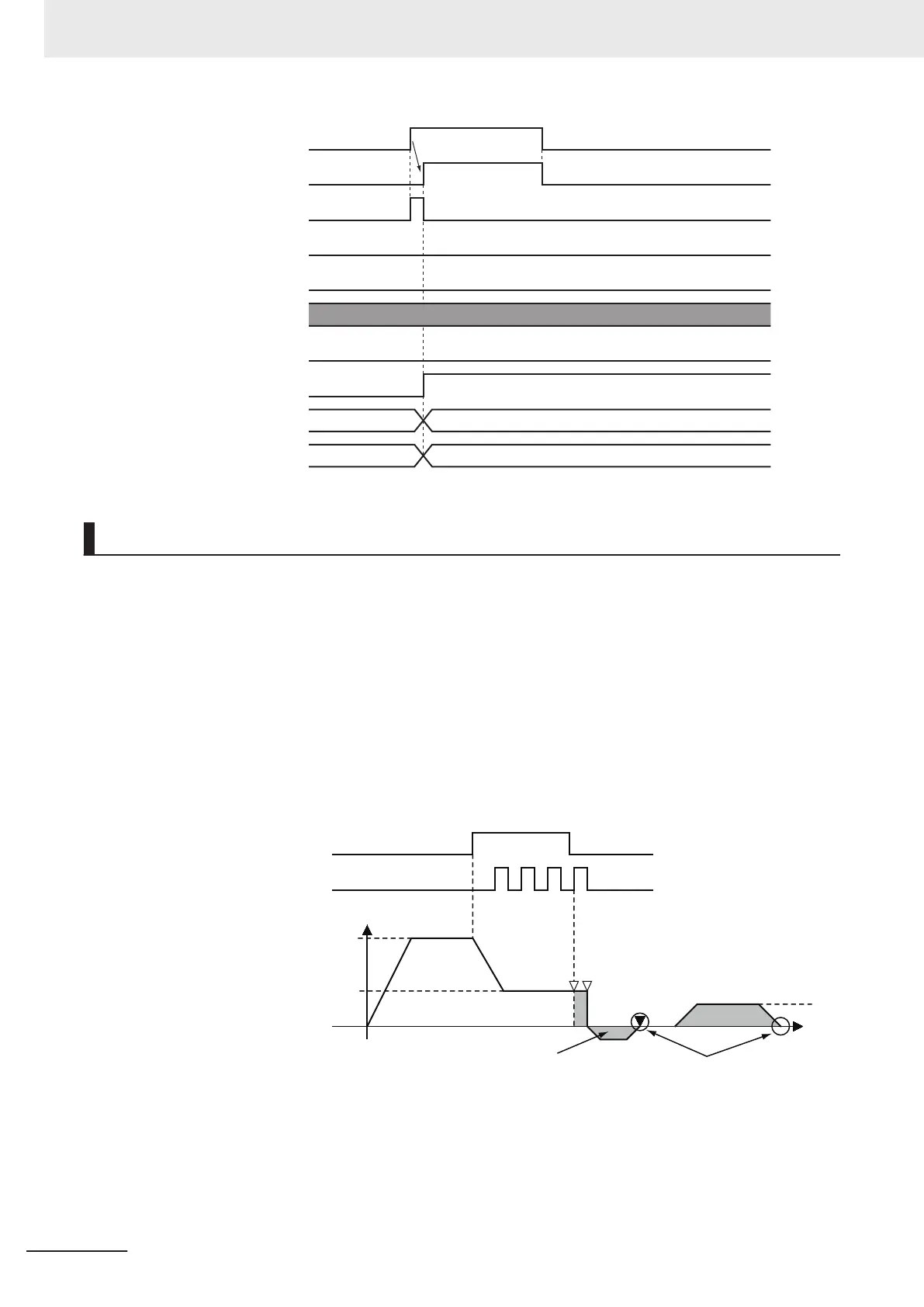
Axis Stopping Method and In-position Check When Homing
The axis is stopped with the following procedure when homing.
1 The actual position where the home input signal was detected is latched and the axis stops imme-
diately
.
2 After the immediate stop, the axis moves with absolute travel in the reverse direction to the posi-
tion that was latched in step 1.
ON
OFF
ON
OFF
Homing
compensation
velocity
In-position check applied.
Homing
compensation value
Stops.
Absolute travel to position where
home input signal was detected
Immediate stop
Actual position latch
Start
Homing approach velocity
Velocity
Homing velocity
Home input
signal
Home proximity
input signal
• Waiting for the in-position state is always performed for this instruction regardless of the setting
of the In-position Check T
ime axis parameter.
Be particularly careful when performing absolute travel to the home input signal detection posi-
tion if the In-position Check Time is set to 0 because the instruction will continue waiting for the
in-position status. Make sure that the signal is received within the in-position range.
3 Axis Command Instructions
3-34
NY-series Motion Control Instructions Reference Manual (W561)