Holding Operation for OMRON G5-series Servo Drives
Torque limits that are set in the Servo Drive in advance are used for the Homing Operation Modes, 12:
Proximity Reverse T
urn/Holding Time and 13: No Home Proximity Input/Holding Home Input, to
automatically start torque control in the home input detection direction.
Precautions for Correct Use
The automatic torque limit function of the MC_Home instruction is not used for servo drives
from other manufacturers.
Use the MC_SetT
orqueLimit instruction, SDO communications, or support software to set suita-
ble values.
Additional Information
• The torque limits are continued even after a normal completion of homing.
•
The torque limits are automatically released when an instruction that moves the axis in the
opposite direction is executed.
Settings for OMRON G5-series Servo Drives
T
o use the holding operation, you must use the support software of the Servo Drive to set the Torque
Limit Selection (3521 hex) in the G5-series Servo Drive.
• Set the Torque Limit Selection to 6 to apply a torque limit in the home input detection direction dur-
ing the holding operation for homing and to use the torque limit directions and values that are set
with the MC_SetTorqueLimit instruction for other operations.
In that case, the values of the input variables to the MC_SetTorqueLimit instruction are ignored dur-
ing the holding operation for homing.
• If the Torque Limit Selection is set to 4, the values of the input variables to the MC_SetTorqueLimit
instruction are always used. You must set torque limits that are suitable both for the holding opera-
tion during homing and for other operations.
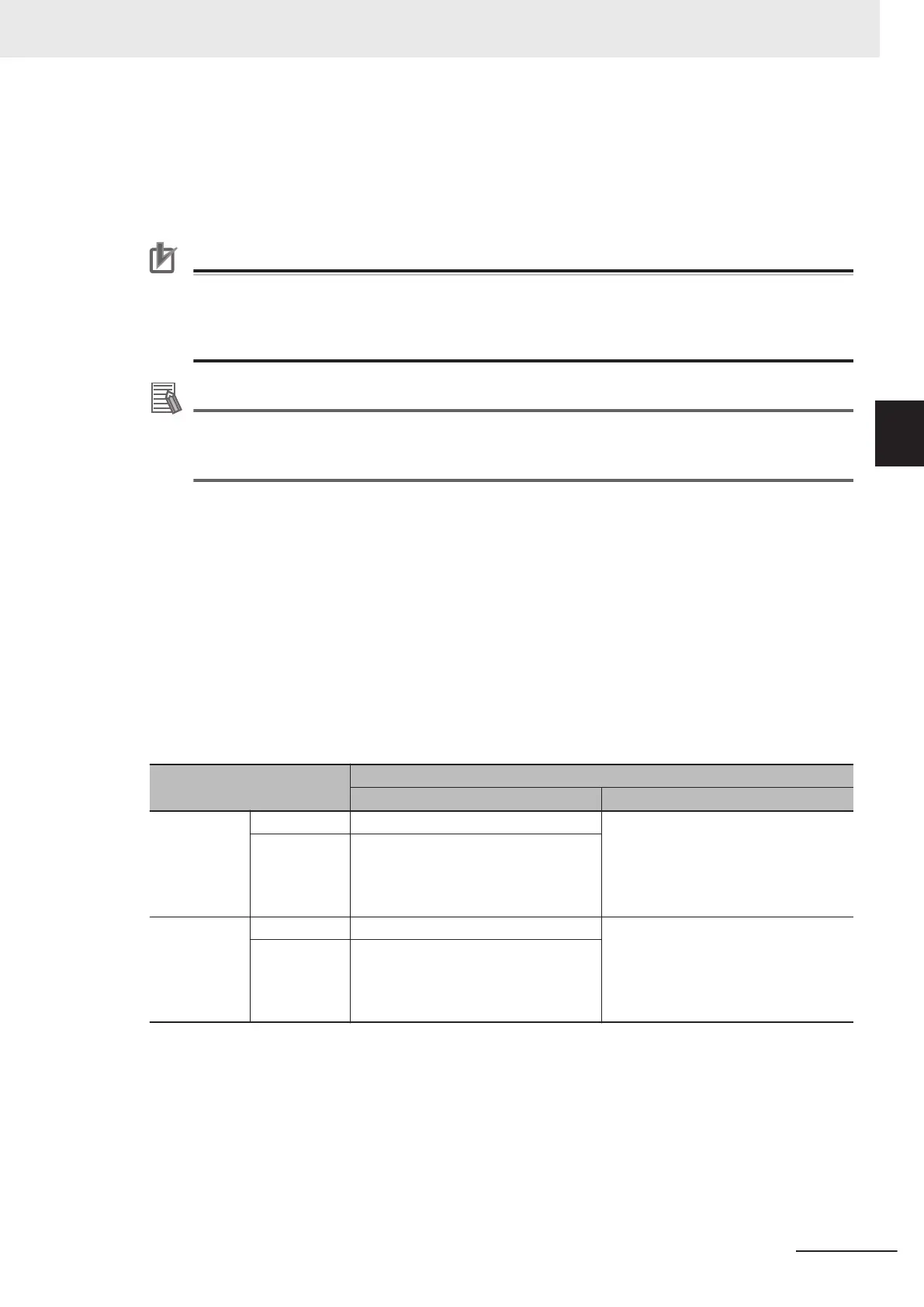
Torque Limit Selection (3521 hex)
6 (recommended) 4
Positive Tor-
que Limit
Homing Torque Limit 3 (3525 hex) is used. The smaller of the PositiveV
alue (Pos-
itive Torque Limit) for the MC_SetTor-
queLimit instruction and Torque Limit
1 (3013 hex) is used.
Operations
other than
Homing
The smaller of the PositiveV
alue (Pos-
itive Torque Limit) for the MC_SetTor-
queLimit instruction and Torque Limit
1 (3013 hex) is used.
Negative Tor-
que Limit
Homing Torque Limit 4 (3526 hex) is used. The smaller of the NegativeV
alue
(Negative Torque Limit) for the
MC_SetTorqueLimit instruction and
Torque Limit 2 (3522 hex) is used.
Operations
other than
Homing
The smaller of the NegativeV
alue
(Negative Torque Limit) for the
MC_SetTorqueLimit instruction and
Torque Limit 2 (3522 hex) is used.
For details on torque limits, refer to MC_SetT
orqueLimit on page 3-348.
For the settings for the G5-series Servo Drive, refer to the AC Servomotors/Servo Drives G5-series
with Built-in EtherCAT Communications User’s Manual (Cat. No. I576) or the AC Servomotors/Servo
Drives G5-series with Built-in EtherCAT Communications Linear Motor Type User’s Manual (Cat. No.
I577).
Monitoring Following Error during Holding Operation
The following error is not monitored during the holding operation for homing.
3 Axis Command Instructions
3-37
NY-series Motion Control Instructions Reference Manual (W561)
MC_Home
3
Function