_sHOMING_REF
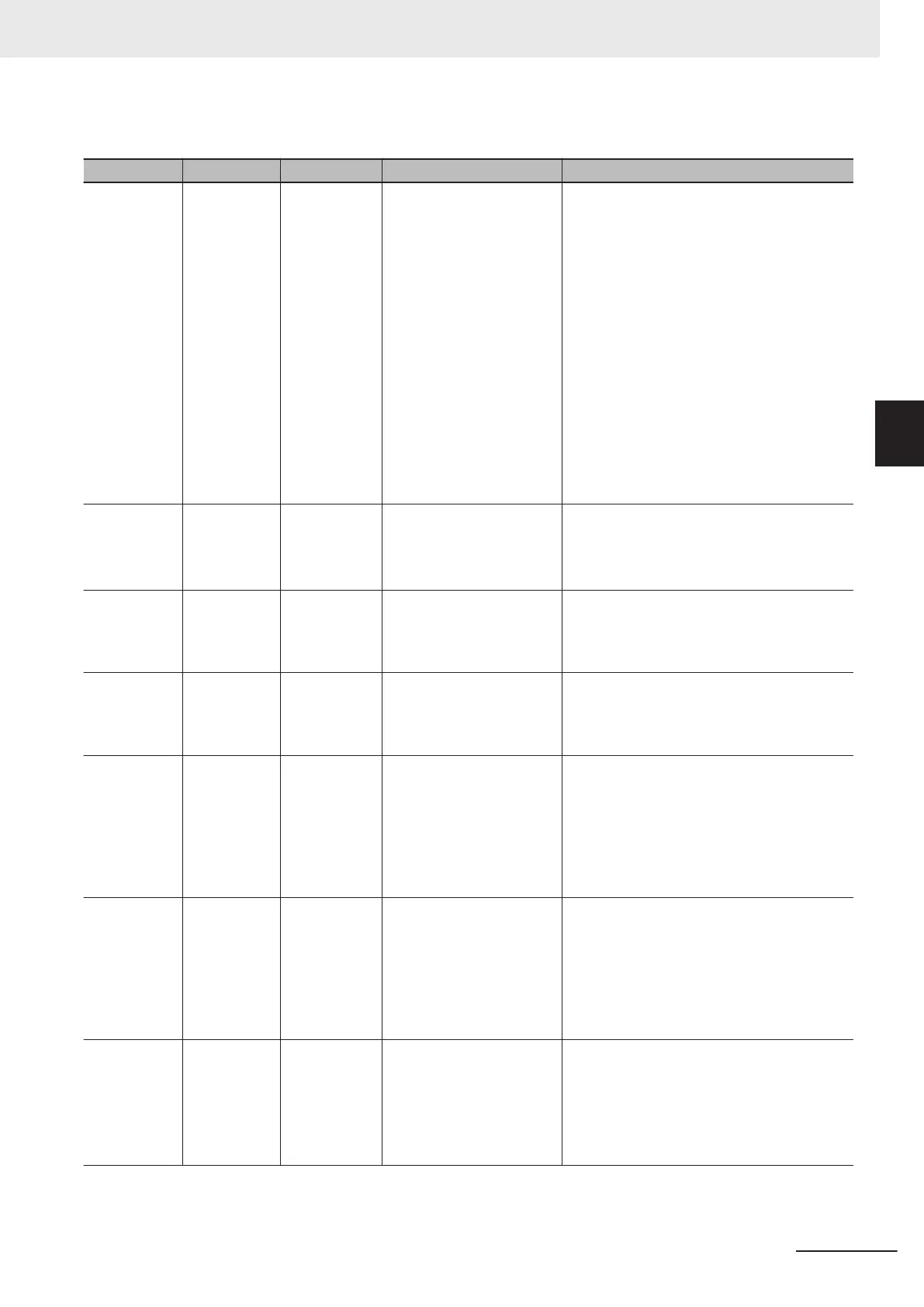
Name Meaning Data type Valid range Function
HomingMode Homing
Method
_eMC_HOM-
ING_MODE
0: _mcHomeSwTurnHo-
meSwOf
f
1: _mcHomeSwTurnHo-
meSwOn
4: _mcHomeSwOff
5: _mcHomeSwOn
8: _mcLimitInputOff
9: _mcHomeSwTurnHo-
meMask
11: _mcLimitInputOnly
12: _mcHomeSwTurnHol-
dingTime
13: _mcNoHomeSwHol-
dingHomeInput
14: _mcHomePreset
Specify the new setting of the Homing Meth-
od.
0: Proximity reverse turn/home proximity in-
put OFF
1: Proximity reverse turn/home proximity in-
put ON
4: Home proximity input OFF
5: Home proximity input ON
8: Limit input OFF
9: Proximity reverse turn/home input mask
distance
11: Limit inputs only
12: Proximity reverse turn/holding time
13: No home proximity input/holding home
input
14: Zero position preset
HomeInput Home Input
Signal
_eMC_HOME
_INPUT
0: _mcZPhase
1: _mcExternalSignal
Select the input to use for the home input
signal.
0: Use the Z-phase input as home.
1: Use external home input.
*1
StartDir Homing Start
Direction
_eMC_DI-
RECTION
0: _mcPositiveDirection
2: _mcNegativeDirection
Set the start direction for when homing is
started.
0: Positive direction
2: Negative direction
HomeDir Home Input
Detection Di-
rection
_eMC_DI-
RECTION
0: _mcPositiveDirection
2: _mcNegativeDirection
Set the home input detection direction for
homing.
0: Positive direction
2: Negative direction
PosiLmtMode Operation
Selection at
Positive Limit
Input
_eMC_LIM-
IT_RE-
VERSE_MOD
E
0: _mcErrorStop
1: _mcRevImmediateStop
2: _mcRevDeceleration-
Stop
Set the stopping method when the positive
limit input turns ON during homing.
0: No reverse turn/minor fault stop (Stop ac-
cording to Limit Input Stop Method parame-
ter
.)
1:Reverse turn/immediate stop
2: Reverse turn/deceleration stop
NegaLmt-
Mode
Operation
Selection at
Negative
Limit Input
_eMC_LIM-
IT_RE-
VERSE_MOD
E
0: _mcErrorStop
1: _mcRevImmediateStop
2: _mcRevDeceleration-
Stop
Set the stopping method when the negative
limit input turns ON during homing.
0: No reverse turn/minor fault stop (Stop ac-
cording to Limit Input Stop Method parame-
ter
.)
1: Reverse turn/immediate stop
2: Reverse turn/deceleration stop
Vel Homing Ve-
locity
LREAL Positive number Set the homing velocity.
Set the homing velocity to a value that is
less than the maximum velocity and greater
than or equal to the homing approach veloci-
ty
.
The unit is command units/s.
*2
3 Axis Command Instructions
3-43
NY-series Motion Control Instructions Reference Manual (W561)
MC_HomeWithParameter
3
Variables