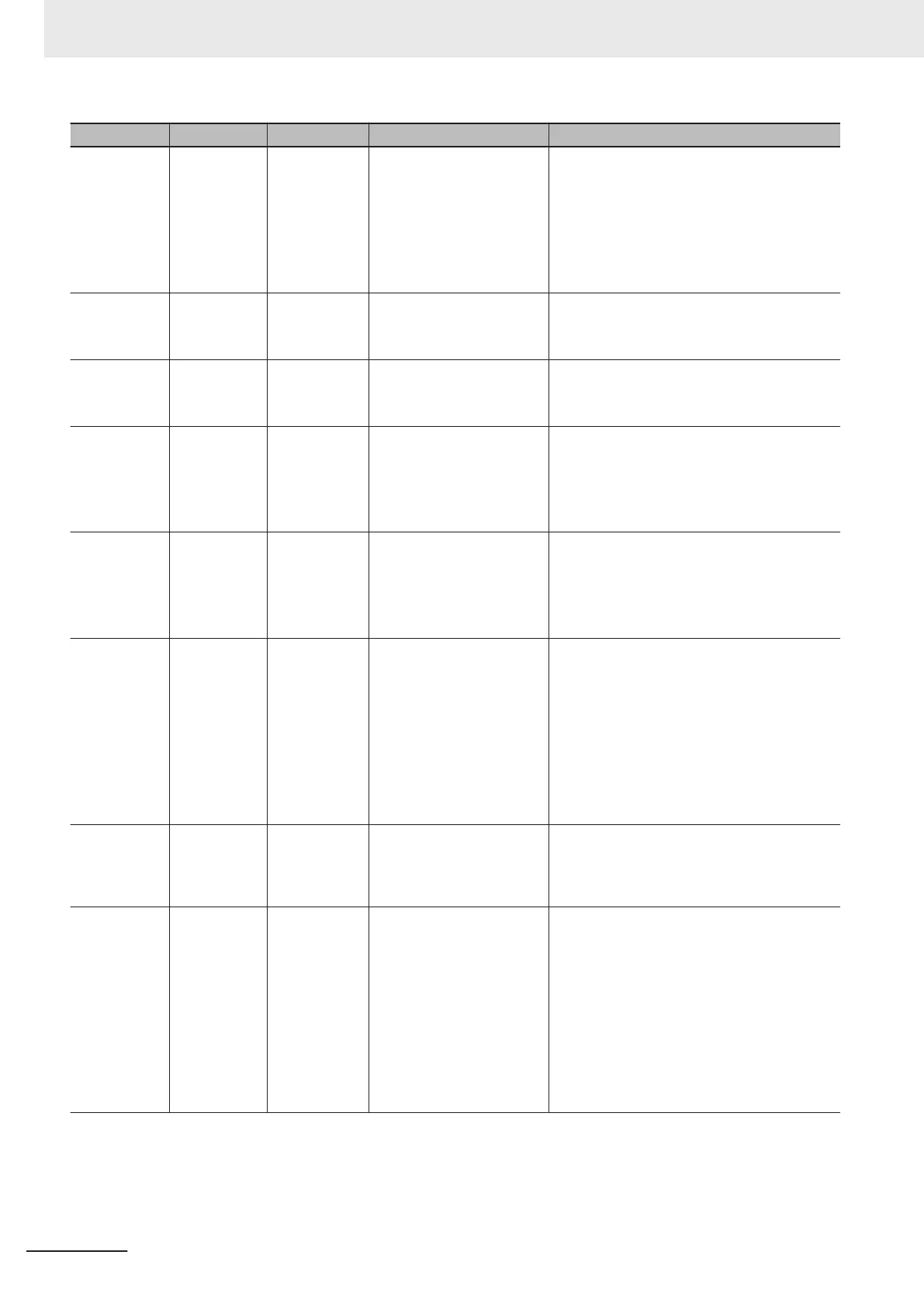
Name Meaning Data type Valid range Function
ApproachVel Homing Ap-
proach V
e-
locity
LREAL Positive number Set the velocity to use after the home prox-
imity input turns ON.
Set the homing velocity to a value that is
less than the maximum velocity and greater
than or equal to the homing approach veloci-
ty.
The unit is command units/s.
*2
Acc Homing Ac-
celeration
LREAL Non-negative number Set the acceleration rate for homing.
Set 0 for no acceleration.
The unit is command units/s
2
.
*2
Dec Homing De-
celeration
LREAL Non-negative number Set the deceleration rate for homing.
Set 0 for no deceleration.
The unit is command units/s
2
.
*2
Jerk Homing Jerk LREAL Non-negative number Set the jerk for homing.
Set 0 for no jerk.
Set the value to within the range of 40-bit da-
ta for pulses.
The unit is command units/s
3
.
*2
Mask Home Input
Mask Dis-
tance
LREAL Non-negative number Set the home input mask distance when you
set the Homing Operation Mode to
Proximity Reverse T
urn/Home Input Mask
Distance.
The unit is command units.
*2
Offset Home Offset LREAL Negative number, positive
number
, or 0
Preset the actual position for the value that
is set after homing.
In Rotary Mode, set the Home Offset param-
eter so that it is greater than or equal to the
modulo minimum position and less than the
modulo maximum position. Also set the val-
ue to within the range of 40-bit data for puls-
es.
The unit is command units.
*2
PushTime Homing
Holding T
ime
UINT 0 to 10,000 Set the holding time when you set the Hom-
ing Operation Mode to Proximity Reverse
Turn/Holding Time.
The unit is milliseconds.
Compensa-
tion
Homing
Compensa-
tion V
alue
LREAL Negative number, positive
number, or 0
Set the homing compensation value that is
applied after the home is defined.
In Rotary Mode, set the homing compensa-
tion value so that the absolute value of the
homing compensation value is less than the
absolute value of the difference between the
modulo maximum position and modulo mini-
mum position. Also set the value to within
the range of 40-bit data for pulses.
The unit is command units.
*2
3 Axis Command Instructions
3-44
NY-series Motion Control Instructions Reference Manual (W561)