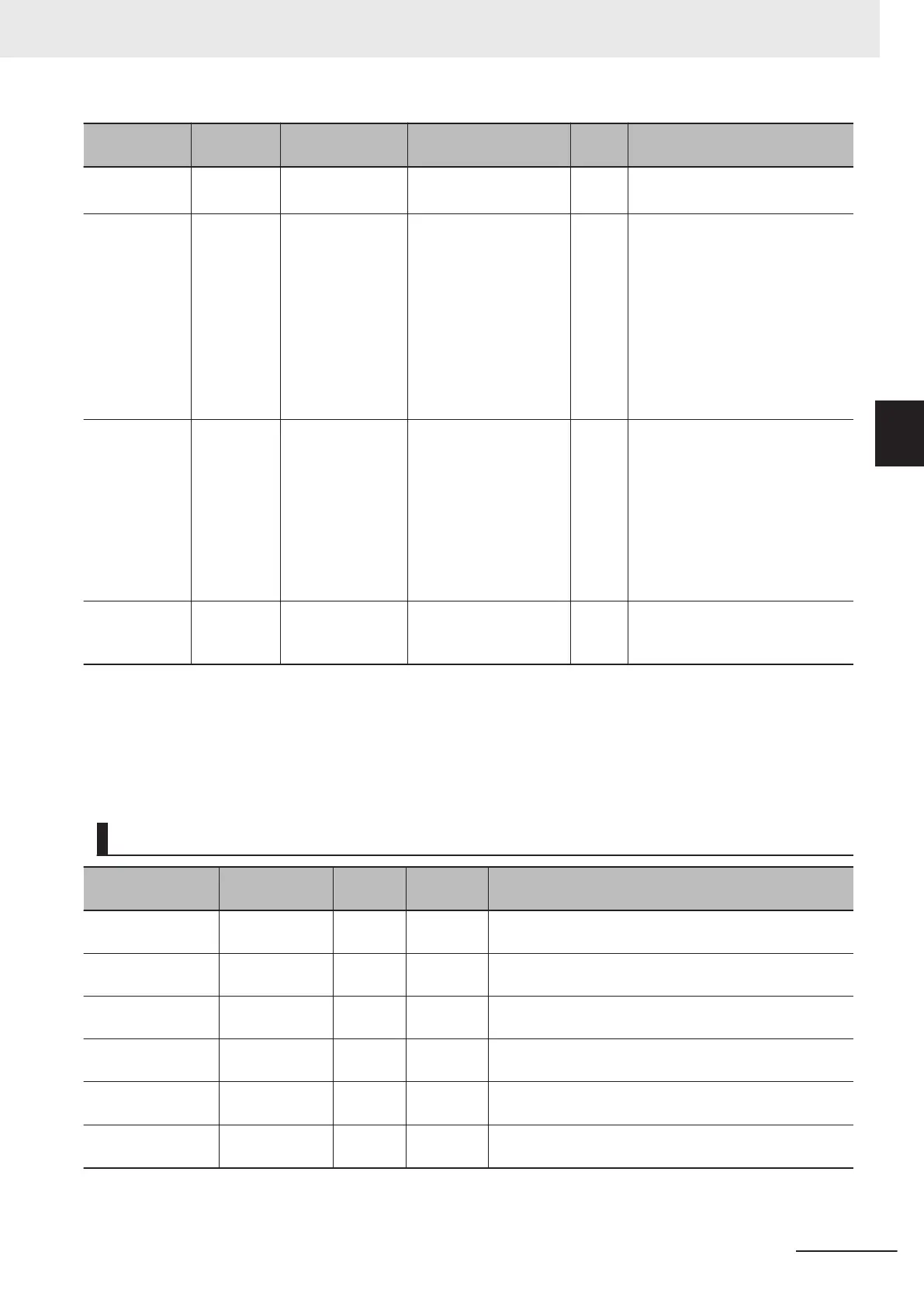
Name Meaning Data type Valid range
De-
fault
Description
Jerk Jerk LREAL Non-negative number 0 Specify the jerk.
The unit is command units/s
3
.
*1
Direction Direction _eMC_DIREC-
TION
0: _mcPositiveDirection
1: _mcShortestW
ay
2: _mcNegativeDirec-
tion
3: _mcCurrentDirection
4: _mcNoDirection
0
*3
Specify the direction of rotation
when MoveMode is set to 0:
Absolute positioning
*4
and
when the Count Mode is Rotary
Mode.
0: Positive direction
1: Shortest way
2: Negative direction
3: Current direction
4: No direction specified
BufferMode Buffer Mode
Selection
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
2: _mcBlendingLow
3: _mcBlendingPrevi-
ous
4: _mcBlendingNext
5: _mcBlendingHigh
0
*3
Specify the operation when exe-
cuting more than one motion in-
struction.
0: Aborting
1: Buffered
2: Blending low
3: Blending previous
4: Blending next
5: Blending high
MoveMode Travel
Mode
_eMC_MOVE_M
ODE
0: _mcAbsolute
1: _mcRelative
0
*3
Select the travel method.
0: Absolute positioning
1: Relative positioning
*1. Refer to Unit Conversion Settings in the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*2. Always set the target velocity. A Target Velocity Setting Out of Range error (error code: 5422 hex) occurs when the
instruction is executed if the target velocity is not set.
*3. The default value for an enumeration variable is actually not the number, but the enumerator.
*4. When MoveMode is set to 1: Relative positioning, the travel direction is determined by the sign of the position.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE when the axis is being controlled.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
ErrorID Error Code WORD
*1
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
*1. The upper four digits of the event code give the error code for ErrorID. Refer to the NY
-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
3 Axis Command Instructions
3-49
NY-series Motion Control Instructions Reference Manual (W561)
MC_Move
3
Variables