Buffer Mode Selec-
tion
Description
Blending low The lower of the target velocities of the current instruction and the buffered instruction is
used as the transit velocity
.
Blending previ-
ous
The target velocity of the current instruction is used as the transit velocity.
Blending next The target velocity of the buffered instruction is used as the transit velocity.
Blending high The higher of the target velocities of the current instruction and the buffered instruction
is used as the transit velocity
.
For details on BufferMode (Buf
fer Mode Selection), refer to the NY-series Industrial Panel PC /
Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
Execution of Other Instructions during Instruction Execution
If you execute another instruction during execution of this instruction, you can specify Aborting,
Buffered, or Blending.
Errors
If an error occurs during instruction execution, Error
will change to TRUE.
You can find out the cause of the error by referring to the value output by ErrorID (Error Code).
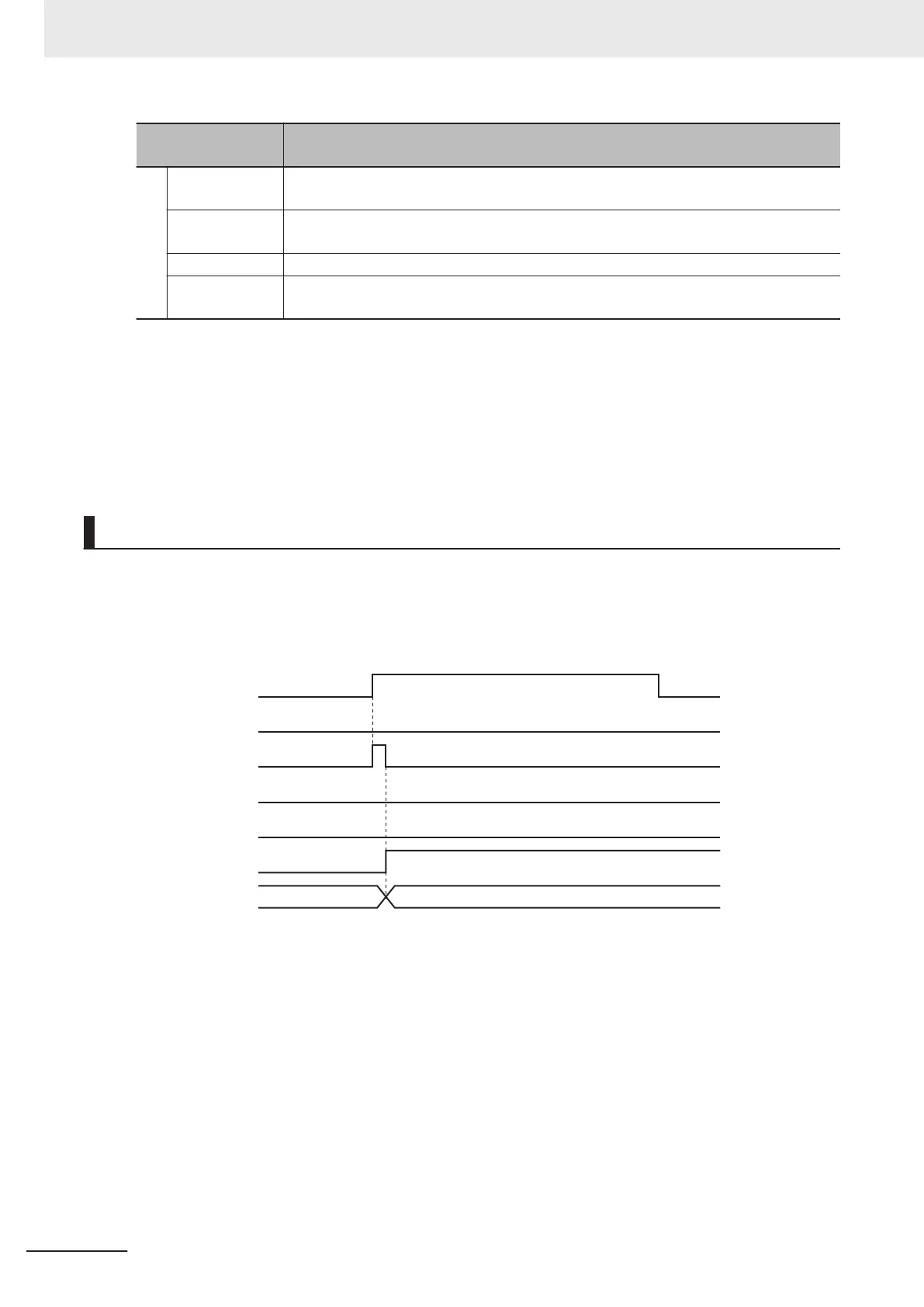
Timing Chart When Error Occurs
Error code
Busy
Done
CommandAborted
Active
Error
16#0000
ErrorID
Execute
Error Codes
Refer to the NY
-series Troubleshooting Manual (Cat. No. W564) for instruction errors.
3 Axis Command Instructions
3-52
NY-series Motion Control Instructions Reference Manual (W561)