Time
Target posi
tion
Command current
position
Deceleration
Target
velocity
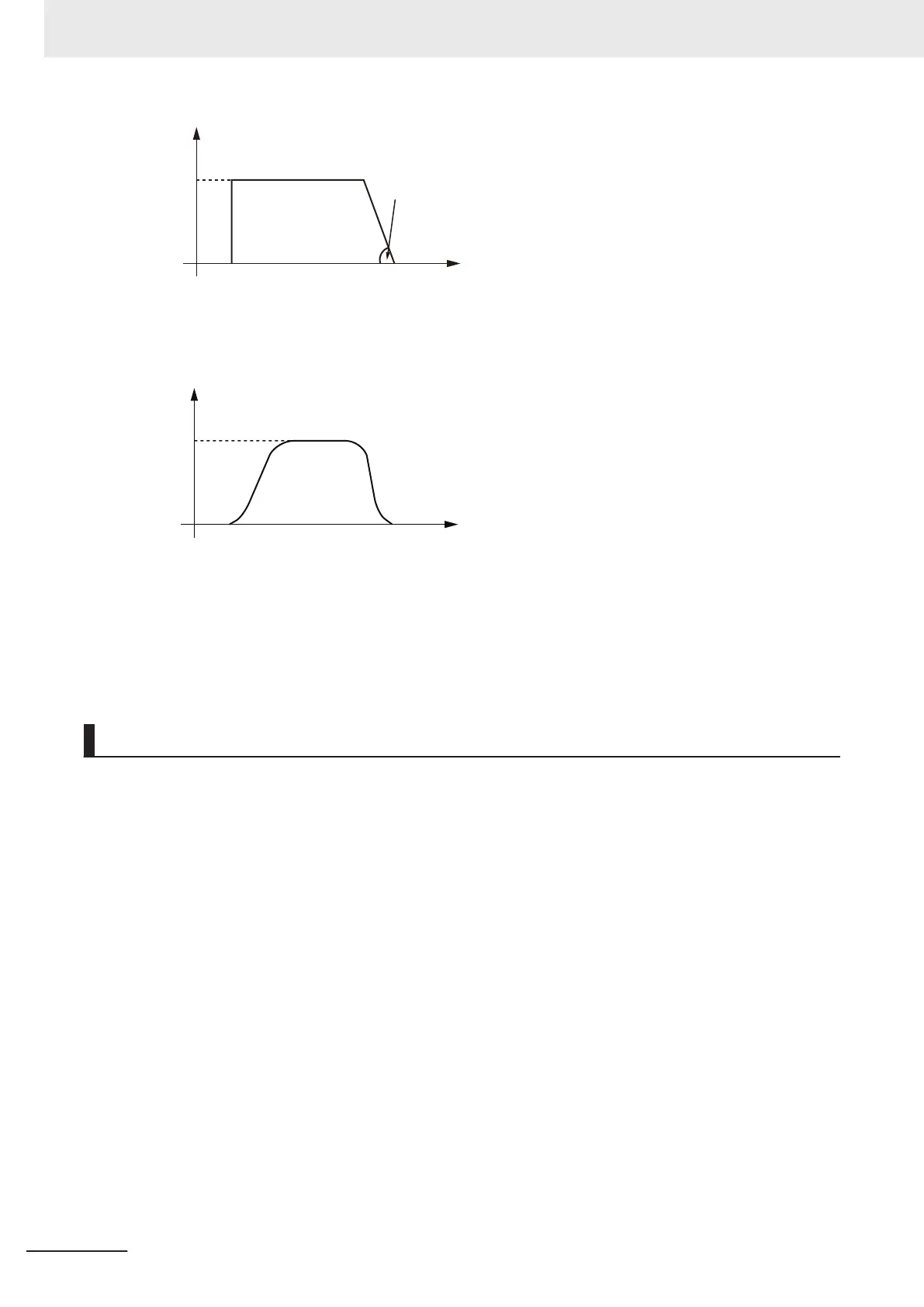
Velocity
0
Specify Jerk when you want to accelerate or decelerate smoothly.
The following chart shows an operation example when Jerk is specified.
0
Time
Target position
Command current
position
Target
velocity
Velocity
For details on Jerk, refer to the NY
-series Industrial Panel PC / Industrial Box PC Motion Control
User’s Manual (Cat. No. W559).
When the positioning is started with Position (Target Position) set to the command current position, the
axis will not move but Done will change to TRUE.
Instruction Details
This section describes the instruction in detail.
Direction
Direction
specifies the direction for starting positioning when the Count Mode is Rotary Mode.
Direction is not used if the Count Mode is Linear Mode.
Positioning starts in the positive direction towards the target position when 0: _mcPositiveDirection
(Positive direction) is specified for Direction.
The following chart shows an operation example when positioning starts with a command position of
50 and moves toward -20.
3 Axis Command Instructions
3-56
NY-series Motion Control Instructions Reference Manual (W561)