Operation Example
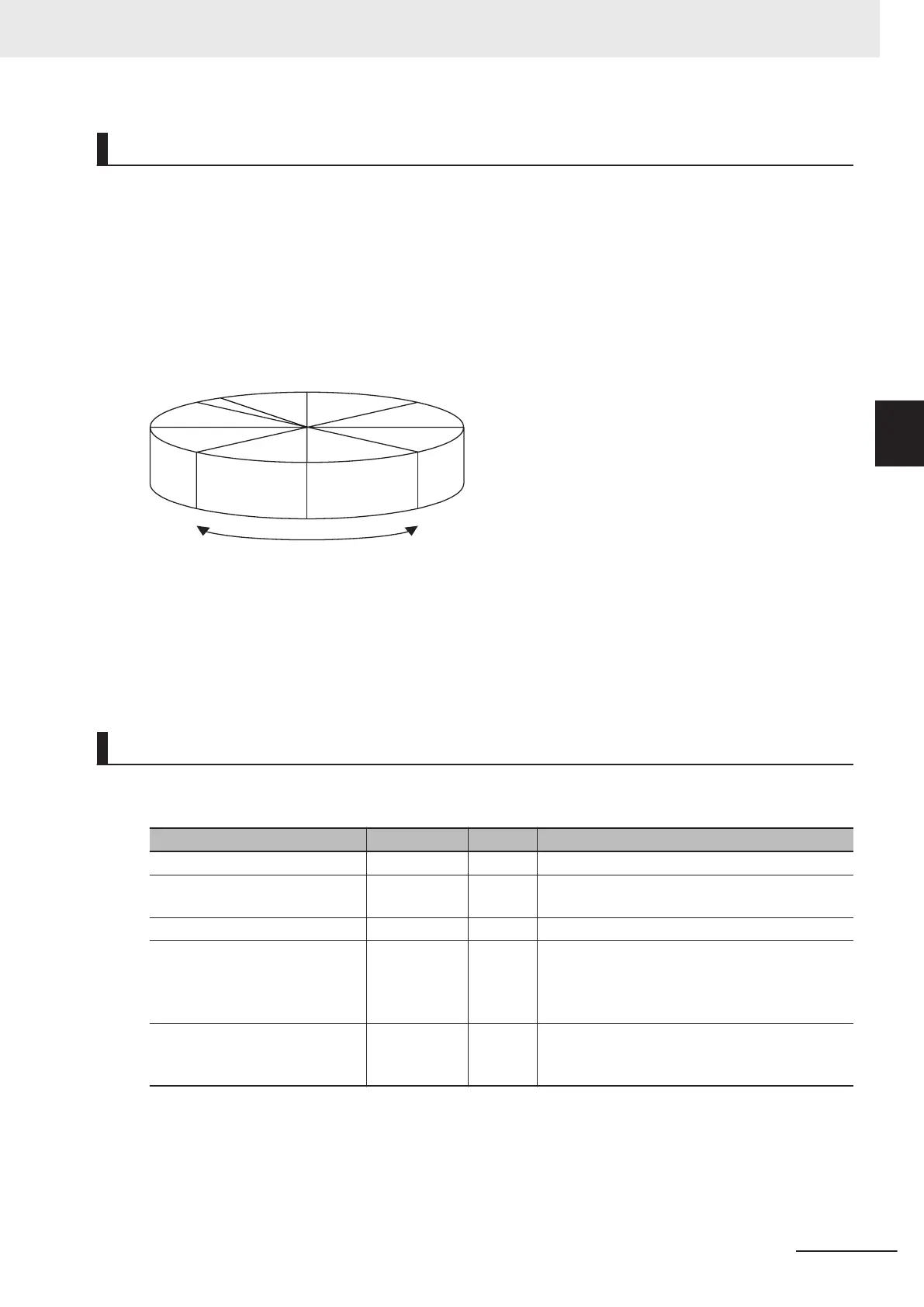
In this sample, multi-execution of absolute positioning instructions is used to position in a range of 0°
to 360°. The actual position returns to 0° once it exceeds the range of 0° to 360°.
Multi-execution of instructions is performed when the Active (Controlling) output variable from the pre-
vious instruction is TRUE. For single-axis operation, multi-execution is possible for only one instruc-
tion.
In this sample, multi-execution of instructions is executed with BufferMode (Buf
fer Mode Selection) set
to Buffered.
Shortest-way positioning is performed.
0°
360°
90°
120°
180°
290°
300°
If you specify 0° (home), 90°, 120°, or 290°, the axis will move to that position.
The rotation direction in this instance is in the shorter rotation direction. The travel velocity is 250°/s.
The sample programming performs positioning with a shortest way specification from 290° to 90° to
120° and then to home (0°).
Ladder Diagram
Main Variables
Name Data type Default Comment
MC_Axis000 _sAXIS_REF --- Axis Variable for axis 1.
MC_Axis000.MFaultLvl.Active BOOL FALSE TRUE while there is a minor fault level error for
axis 1.
MC_Axis000.Details.Homed BOOL FALSE TRUE when home is defined for axis 1.
Pwr_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR instance of the MC_Pow-
er instruction. This variable changes to TRUE
when the Servo is turned ON.
StartPg BOOL FALSE The Servo is turned ON if this variable is TRUE
and EtherCA
T process data communications are
established.
3 Axis Command Instructions
3-71
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveAbsolute
3
Sample Programming 2