HM
Axis
Axis
Execute
Error
ErrorID
CommandAborted
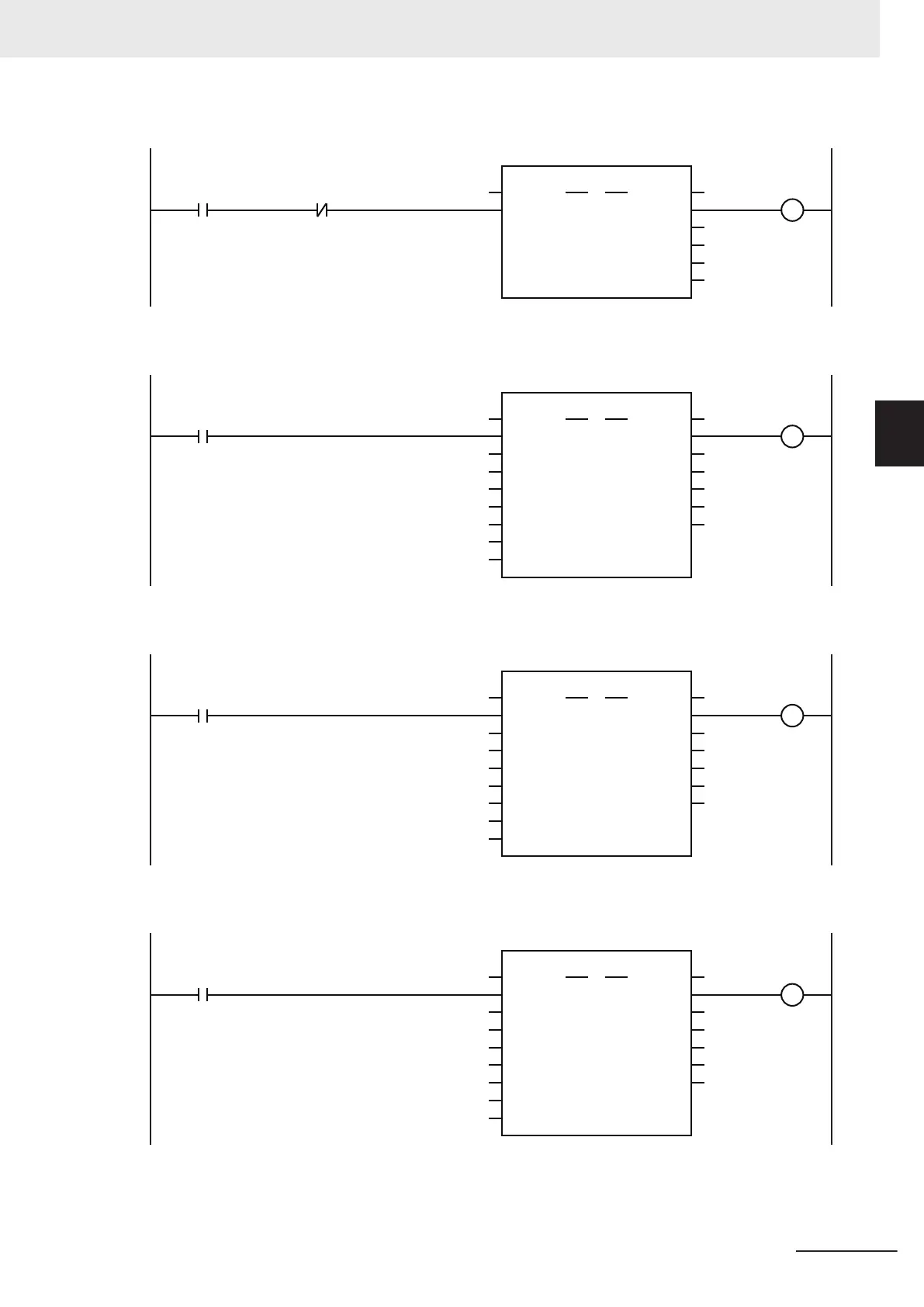
MC_Home
Done
Busy
MC_Axis000
Pwr_Status
H
m_D
Hm_Bsy
Hm_Ca
Hm_Err
Hm_ErrID
MC_Axis000.Details.Homed
If the Servo is ON and home is not defined, the Home instruction is executed.
BufferMode
M
V_ABS1
Deceleration
Active
Axis Axis
Execute Done
Position Busy
Acceleration
Error
Jerk
Direction
MC_MoveAbsolute
Velocity
CommandAborted
ErrorID
MC_Axis000
H
m_D
_eMC_DIRECTION#_mcShortestWay
LREAL#290.0
LREAL#250.0
LREAL#1000.0
LREAL#1000.0
Mv_Abs1_Bsy
Mv_Abs1_Act
Mv_Abs1_Ca
Mv_Abs1_Err
Mv_Abs1_ErrID
Mv_Abs1_D
After home is defined, absolute positioning 1 is executed to move to 290.0°.
The shortest way is specified for the motion direction.
BufferMode
M
V_ABS2
Deceleration
Active
Axis Axis
Execute Done
Position Busy
Acceleration
Error
Jerk
Direction
MC_MoveAbsolute
Velocity
CommandAborted
ErrorID
MC_Axis000
Mv_Abs1_Act
_eMC_DIRECTION#_mcShortestWay
_eMC_BUFFER_MODE#_mcBuffered
LREAL#90.0
LREAL#250.0
LREAL#1000.0
LREAL#1000.0
Mv_Abs2_Bsy
Mv_Abs2_Act
Mv_Abs2_C
a
Mv_Abs2_Err
Mv_Abs2_ErrID
Mv_Abs2_D
Absolute positioning 2 is executed with multi-execution of instructions to move from 290.0° to 90.0°.
The shortest way is used for the motion direction.
BufferMode
M
V_ABS3
Deceleration
Active
Axis Axis
Execute Done
Position Busy
Acceleration
Error
Jerk
Direction
MC_MoveAbsolute
Velocity
CommandAborted
ErrorID
MC_Axis000
Mv_Abs2_Act
_eMC_DIRECTION#_mcShortestWay
_eMC_BUFFER_MODE#_mcBuffered
LREAL#120.0
LREAL#250.0
LREAL#1000.0
LREAL#1000.0
Mv_Abs3_Bsy
Mv_Abs3_Act
Mv_Abs3_C
a
Mv_Abs3_Err
Mv_Abs3_ErrID
Mv_Abs3_D
Absolute positioning 3 is executed with multi-execution of instructions to move from 90.0° to 120.0°.
The shortest way is used for the motion direction.
3 Axis Command Instructions
3-73
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveAbsolute
3
Sample Programming 2