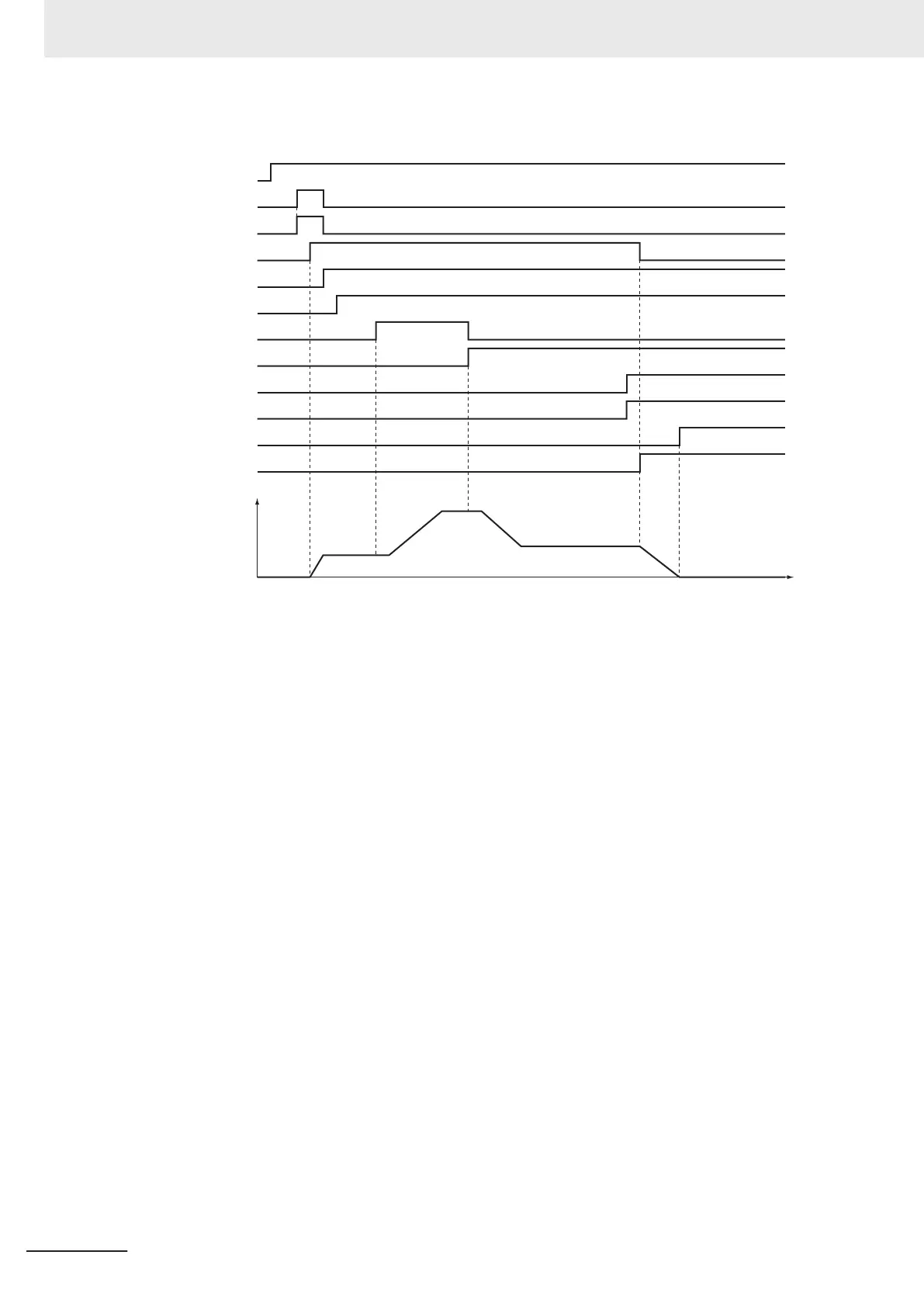
Timing Chart
Pwr_Status
Sensor1
Vel_Ex
Vel_Act
Set_Ov_En
Set_Ov_End
Sensor2
Sensor3
StopTrig
Stp_Ex
Stp_D
Stp_Act
MC_Axis000
Command velocity
Time
Sample Programming
// Processing when input parameters are not set
IF InitFlag = FALSE THEN
// MC_MoveVelocity parameters
Vel_Vel := LREAL#1048576.0;
Vel_Acc := LREAL#1048576.0;
Vel_Dec := LREAL#1048576.0;
Vel_Dir :=_eMC_DIRECTION#_mcPositiveDirection;
// MC_SetOverride parameters
Set_Ov_Velfct := LREAL#100.0;
// MC_Stop parameters
Stp_Dec := LREAL#524288.0;
// Change InitFlag to TRUE after setting the input parameters.
InitFlag:=TRUE;
END_IF;
// If StartPg is TRUE and the Servo Drive is ready, the Servo for axis 1 is turned
ON.
// If the Servo Drive is not ready, the Servo is turned OFF.
IF (StartPg=TRUE)
3 Axis Command Instructions
3-100
NY-series Motion Control Instructions Reference Manual (W561)