Mv_Zero_Bsy
Mv_Zero_Act
Mv_Zero_Ca
Mv_Zero_Err
Mv_Zero_ErrID
Mv_Zero_D
Mv_Zero_Vel
Mv_Zero_Acc
Mv_Zero_Dec
Mv_Zero_Jrk
Mv_Zero_Bm
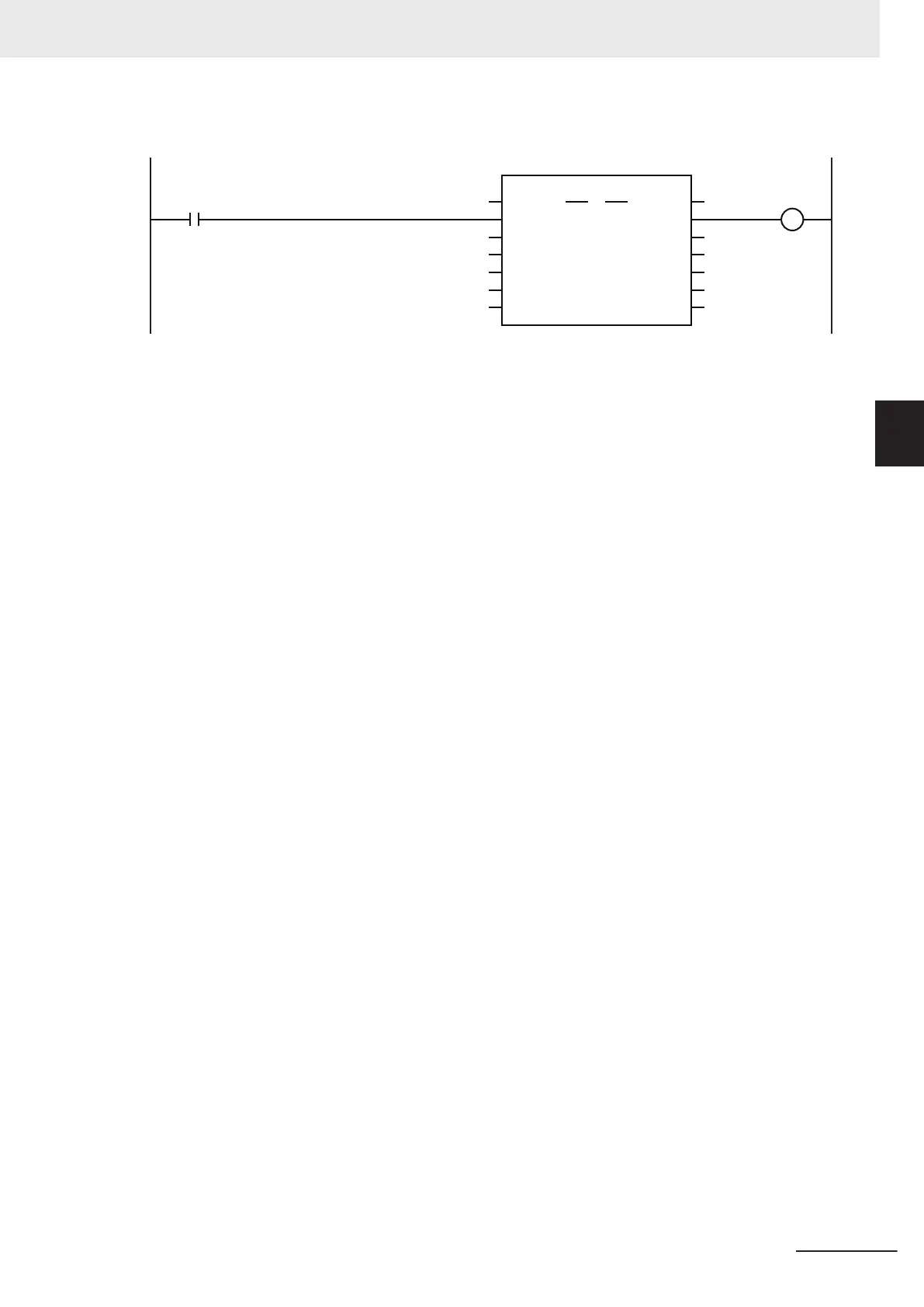
MV_ZERO
Jerk
Active
Axis Axis
Execute Done
Velocity Busy
Deceleration
Error
BufferMode
MC_MoveZeroPosition
Acceleration
CommandAborted
ErrorID
MC_Axis001
Mv_
Abs_Act
After absolute positioning is completed, the MC_MoveZeroPosition (High-speed Home) instruction is executed
to move to home.
Contents of Inline ST
// MV_FEED parameters
Mv_Feed_TrigRef.Mode := _eMC_TRIGGER_MODE#_mcDrive;
Mv_Feed_TrigRef.LatchID := _eMC_TRIGGER_LATCH_ID#_mcLatch1;
Mv_Feed_TrigRef.InputDrive := _eMC_TRIGGER_INPUT_DRIVE#_mcEXT;
Mv_Feed_TrigVar := FALSE;
Mv_Feed_Pos := LREAL#2000.0;
Mv_Feed_Vel := LREAL#1000.0;
Mv_Feed_Acc := LREAL#10000.0;
Mv_Feed_Dec := LREAL#10000.0;
Mv_Feed_Mm := _eMC_MOVE_MODE#_mcVelocity;
Mv_Feed_FeedDis := LREAL#500.0;
Mv_Feed_FeedVel := LREAL#500.0;
// MV_ABS parameters
Mv_Abs_Pos := LREAL#1000.0;
Mv_Abs_Vel := LREAL#500.0;
Mv_Abs_Acc := LREAL#10000.0;
Mv_Abs_Dec := LREAL#10000.0;
Mv_Abs_Jrk := LREAL#10000.0;
// MV_ZERO parameters
Mv_Zero_Vel := LREAL#500.0;
Mv_Zero_Acc := LREAL#10000.0;
Mv_Zero_Dec := LREAL#10000.0;
Mv_Zero_Jrk := LREAL#10000.0;
Mv_Zero_Bm := _eMC_BUFFER_MODE#_mcBuffered;
// Change InitFlag to TRUE after setting the input parameters.
InitFlag := TRUE;
3 Axis Command Instructions
3-133
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveFeed
3
Sample Programming