• The deceleration stop operation starts when Execute changes to TRUE.
• CommandAborted for the instruction that is currently in operation will change to TRUE when
MC_Stop is executed.
Precautions for Correct Use
You cannot execute this instruction if the Status.ErrorStop (Error Deceleration Stopping) varia-
ble that gives the status of this axis is TRUE.
Use the MC_ImmediateStop instruction to stop the motion of an axis that is decelerating to a
stop for an error
.
Instruction Details
This section describes the instruction in detail.
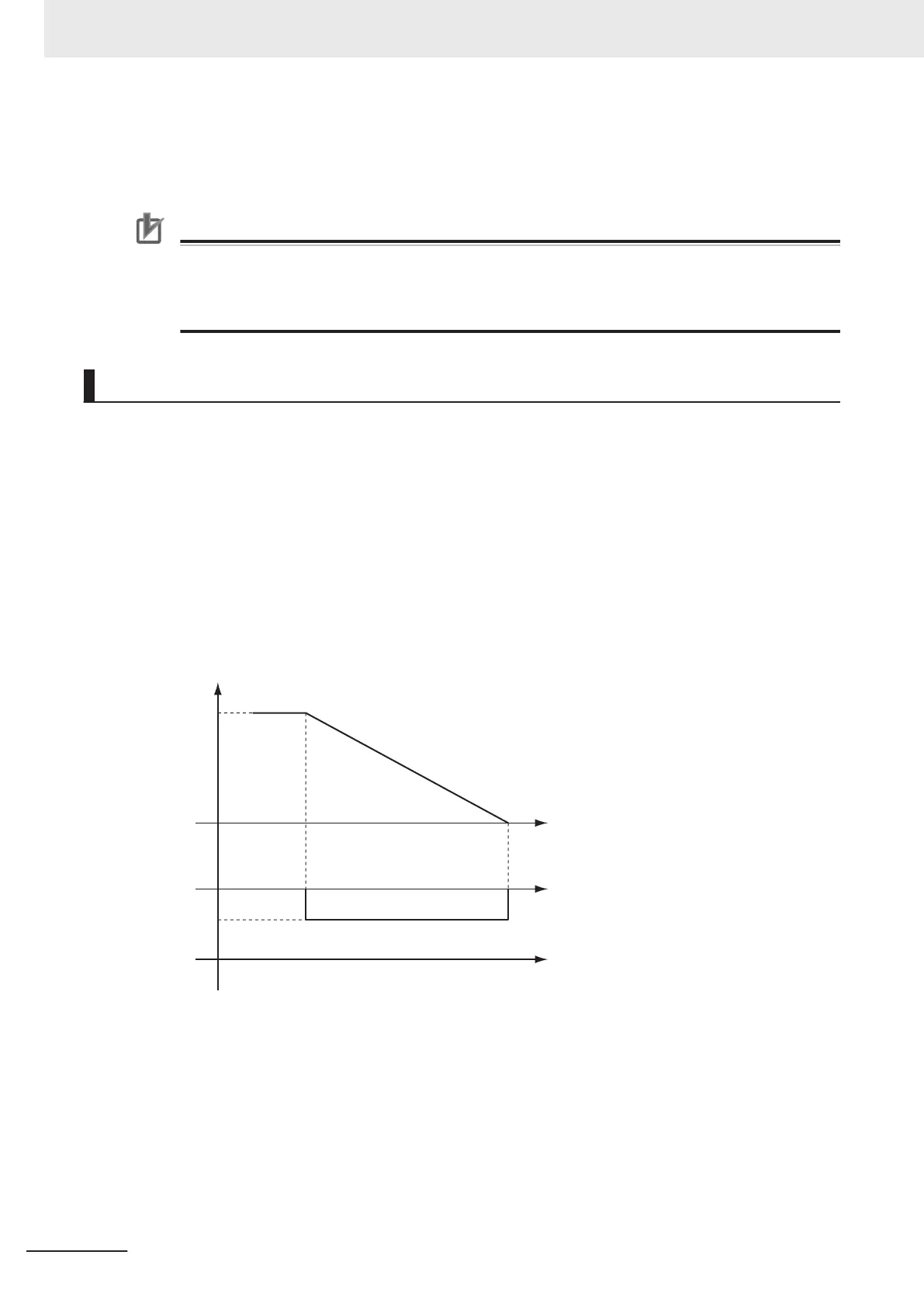
Specifying Deceleration and Jerk
Set the input variables Deceleration and Jerk to set the deceleration rate and jerk when decelerating
to a stop.
The relationship between the deceleration and velocity when Jerk is set to 0
and when it is set to any
other value is shown below.
Jerk Set to 0
The command value for the velocity is created with deceleration rate Dt.
Vt
-Dt
Jt = 0
Time
Time
Time
Velocity
Jerk
Decelera-
tion rate
Velocity
Vt: Velocity when deceleration starts, Dt: Specified deceleration rate, Jt: Specified jerk
Jerk
Set to Any Value Other Than 0
The command value for the velocity is created based on the current velocity with Dt as the upper limit
to the deceleration rate.
3 Axis Command Instructions
3-142
NY-series Motion Control Instructions Reference Manual (W561)