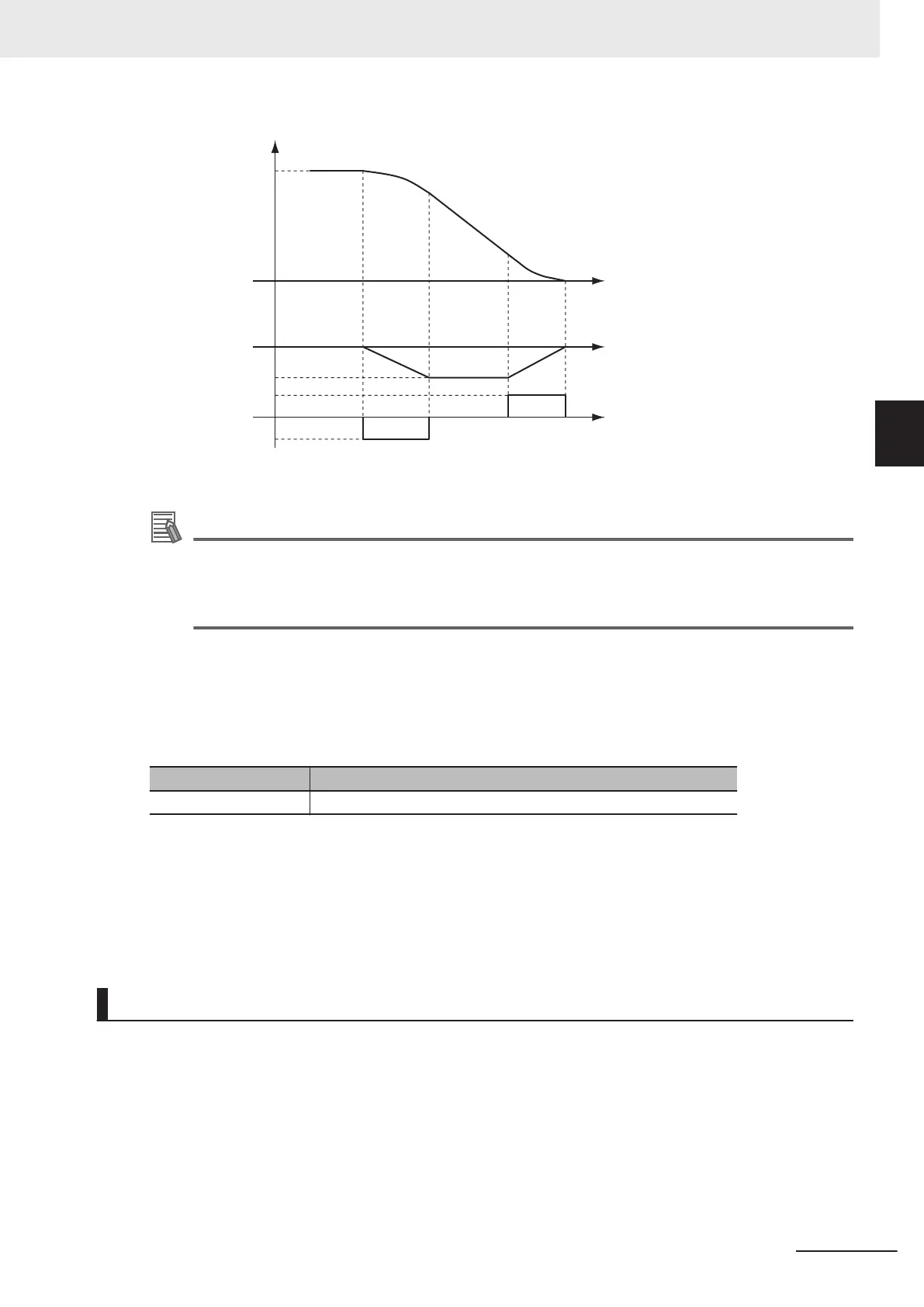
Vt
-Dt
Jt
-Jt
Time
Time
TimeVelocity
Deceleration rate
Jerk
Velocity
Vt: Velocity when deceleration starts, Dt: Specified deceleration rate, Jt: Specified jerk
Additional Information
If you set the Deceleration to 0, an Immediate Stop instruction is executed. This will stop the
axis immediately without decelerating.
An immediate stop occurs regardless of the setting of the Acceleration/Deceleration Over ax-
is parameter only when the Deceleration is set to 0.
Specifying Buf
ferMode (Buffer Mode Selection)
This variable specifies how to join the axis motions for this instruction and the previous instruction.
BufferMode
(Buffer Mode Selection) of this instruction is a reserved parameter for future expansion.
There is only the following setting.
Buffer Mode Selection Description
Aborting Aborts the instruction being executed and executes this instruction.
For details on BufferMode (Buf
fer Mode Selection), refer to the NY-series Industrial Panel PC /
Industrial Box PC Motion Control User’s Manual (Cat. No. W559).
In-position Check
An in-position check is not performed when stopping for this instruction.
Timing Charts
• Busy (Executing) changes to TRUE at the same time as Execute changes to TRUE. Active (Control-
ling) changes to TRUE in the next period.
• Done changes to TRUE when a velocity of 0 is reached.
•
If another instruction aborts this instruction, CommandAborted changes to TRUE and Busy (Execut-
ing) and Active (Controlling) change to FALSE.
3 Axis Command Instructions
3-143
NY-series Motion Control Instructions Reference Manual (W561)
MC_Stop
3
Function