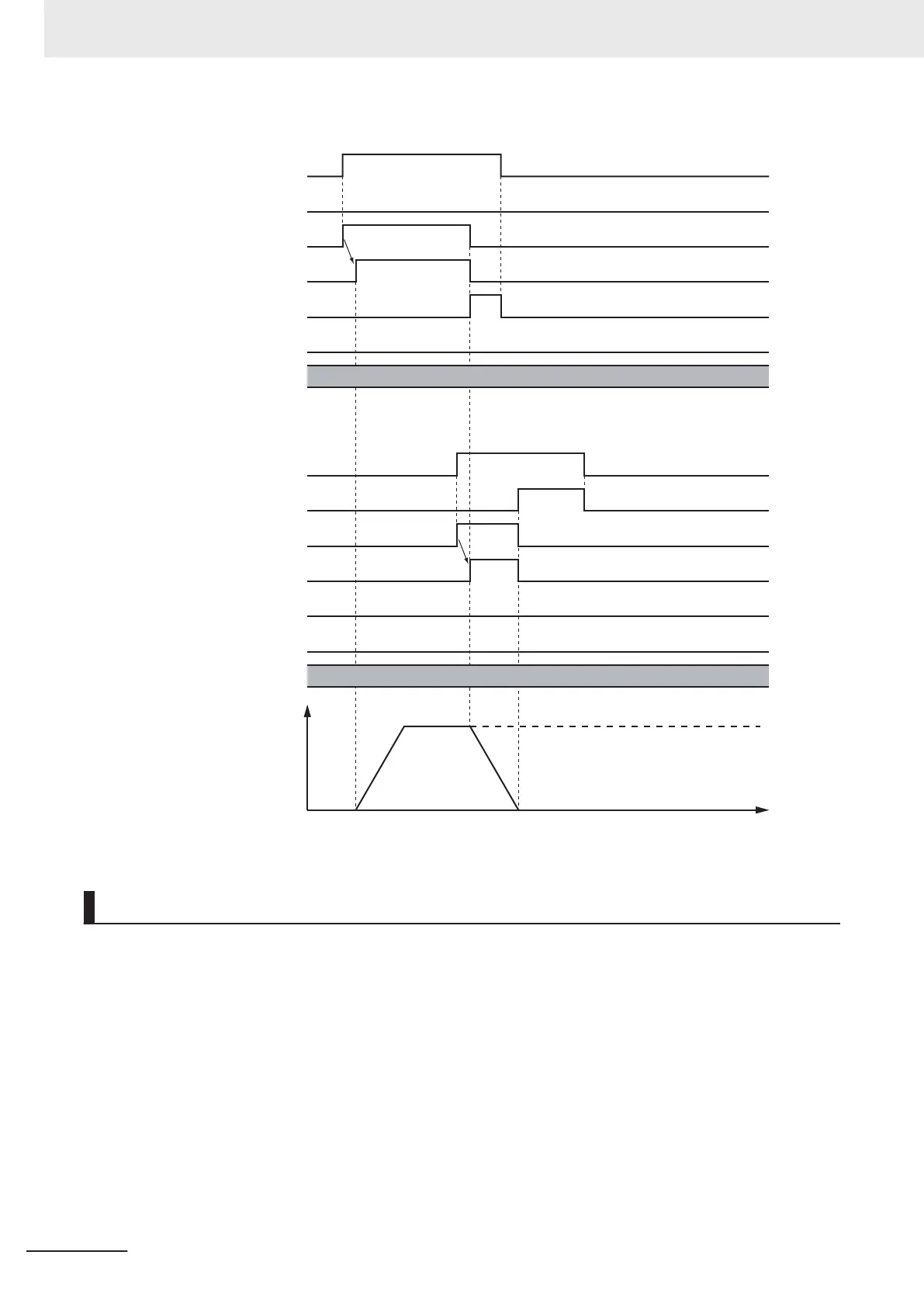
Time
Velocity
Executing MC
_Stop Instruction
Executing an Axis Instruction
Busy
Done
CommandAborted
Active
Error
16#0000
ErrorID
Execute
Busy
Done
CommandAborted
Active
Error
16#0000
Error
ID
Execute
Re-execution of Motion Control Instructions
Deceleration (Deceleration Rate) changes if Execute is changed to TRUE again while this instruction
is in execution.
The Jerk setting is not changed when a motion control instruction is re-executed.
Jerk Set to Any V
alue Other Than 0
The command value for the velocity is created based on the current velocity and deceleration rate,
with Dt2 as the upper limit to the deceleration rate after it is changed.
3 Axis Command Instructions
3-144
NY-series Motion Control Instructions Reference Manual (W561)