If you execute this instruction on an encoder axis, the actual current position will change to the
specified target position.
•
Specify the target position in absolute coordinates.
• The actual current position changes at the same time as the command current position changes.
The following error is kept the same before and after the change. If you execute this instruction on a
command servo axis, the difference between the actual position and the actual current position will
remain the same before and after the change.
Because of this, after you execute this instruction, the actual current position of the axis takes the
value calculated by the following equation.
Actual current position after change = Target position - Following error before change
• If you specify the actual position for a servo axis or the command position for an encoder axis, a
position type error will occur.
• When the Count Mode is set to Rotary Mode, set the target position to a value that is equal to or
greater than the Modulo minimum position and less than the Modulo maximum position. A ring
counter error will occur if the target position is outside this range.
• When the Count Mode is set to Linear Mode, you can set the target position to a value outside the
range defined by the software limits.
• You can use this instruction for an axis that is stopped or in motion.
Precautions for Correct Use
Home is undefined for the specified axis after this instruction ends.
Because of this, you cannot execute following functions or instructions after this instruction
ends.
•
Software limits
• MC_MoveZeroPosition (High-speed Home) instruction
• Multi-axes coordinated control instructions (linear or circular interpolation)
ReferenceType (Position Type Selection)
• Set this variable to 0: _mcCommand (Command position) to use a servo axis or virtual servo axis.
•
Set this variable to 1: _mcFeedback (Actual position) to use an encoder axis or virtual encoder ax-
is.
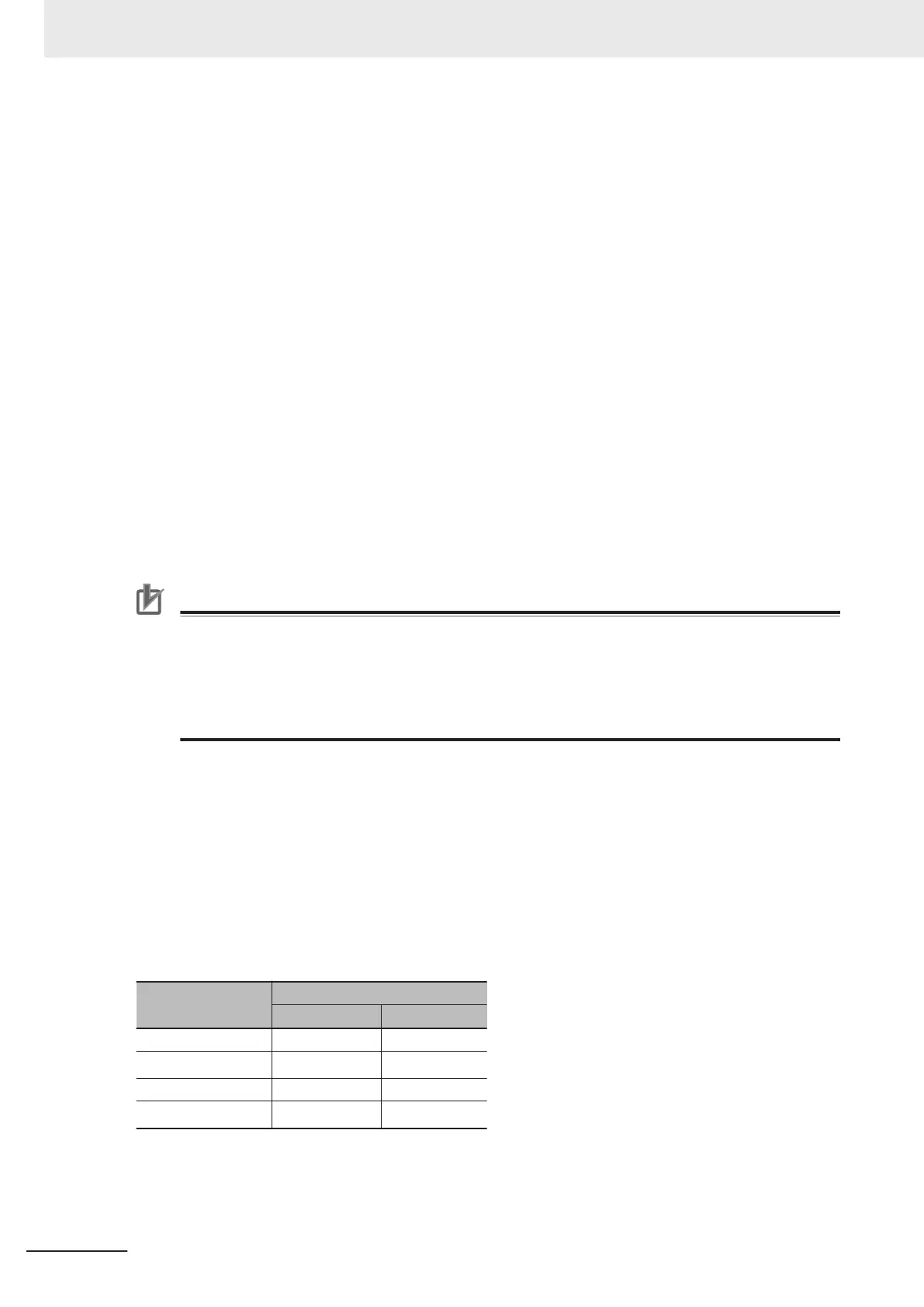
Relationship between Axis Types and Position Types
The relationship between the axis types that you can monitor and position types that is monitored is
shown below.
Axis Type
ReferenceType
_mcCommand _mcFeedback
Servo axis OK No
Encoder axis
No
*1
OK
Virtual servo axis OK No
Virtual encoder axis
No
*1
OK
*1. A Position Type Selection Out of Range error (error code: 5430 hex) occurs when the instruction is execut-
ed.
3 Axis Command Instructions
3-156
NY-series Motion Control Instructions Reference Manual (W561)