Most recent
command position
Command position
Remainder
Denom
inator
Numerator
Gear function
Command position
Actual position
Specified with
ReferenceTy
p e.
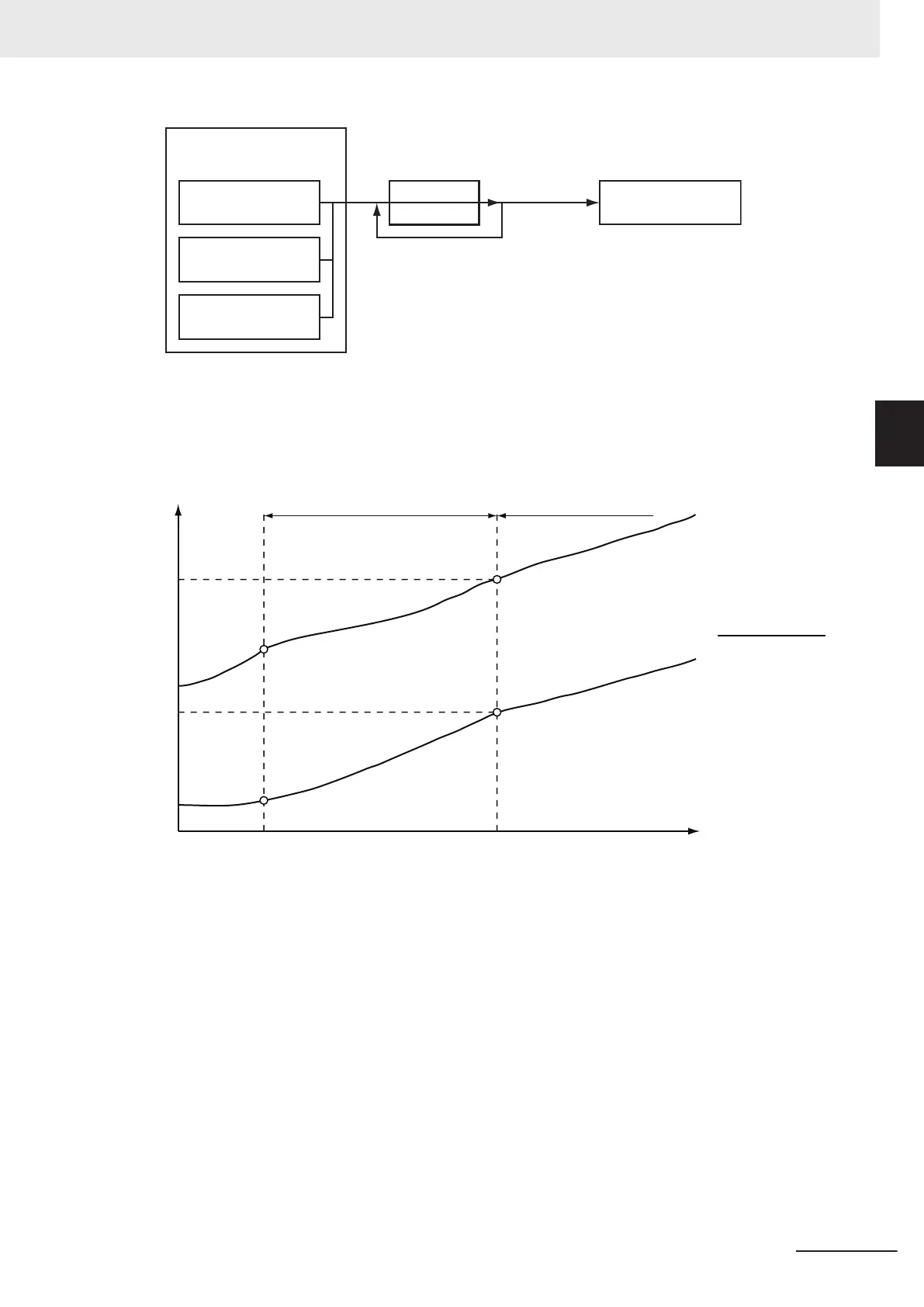
• After operation starts, Slave (Slave Axis) uses the velocity of Master (Master Axis) multiplied by the
gear ratio for its target velocity
, and accelerates/decelerates accordingly.
• The catching phase exists until the target velocity is reached. The InGear phase exists after that.
• If the gear ratio is positive, Slave (Slave Axis) and Master (Master Axis) move in the same direction.
Execute
Catching phase
InGear phase
Slave
RatioDenominator
RatioNumerator
Master
Travel distance of slave axis
= Travel distance of master axis ×
Position
Time
• If the gear ratio is negative, Slave (Slave Axis) and Master
(Master Axis) move in the opposite direc-
tions.
3 Axis Command Instructions
3-249
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearIn
3
Function