Jerk
BufferMode
GEARIN1
ReferenceType
Master
Master
Slave
Slave
Execute
InGear
RatioDenominator
Error
ErrorID
CommandAborted
Acceleration
Active
Deceleration
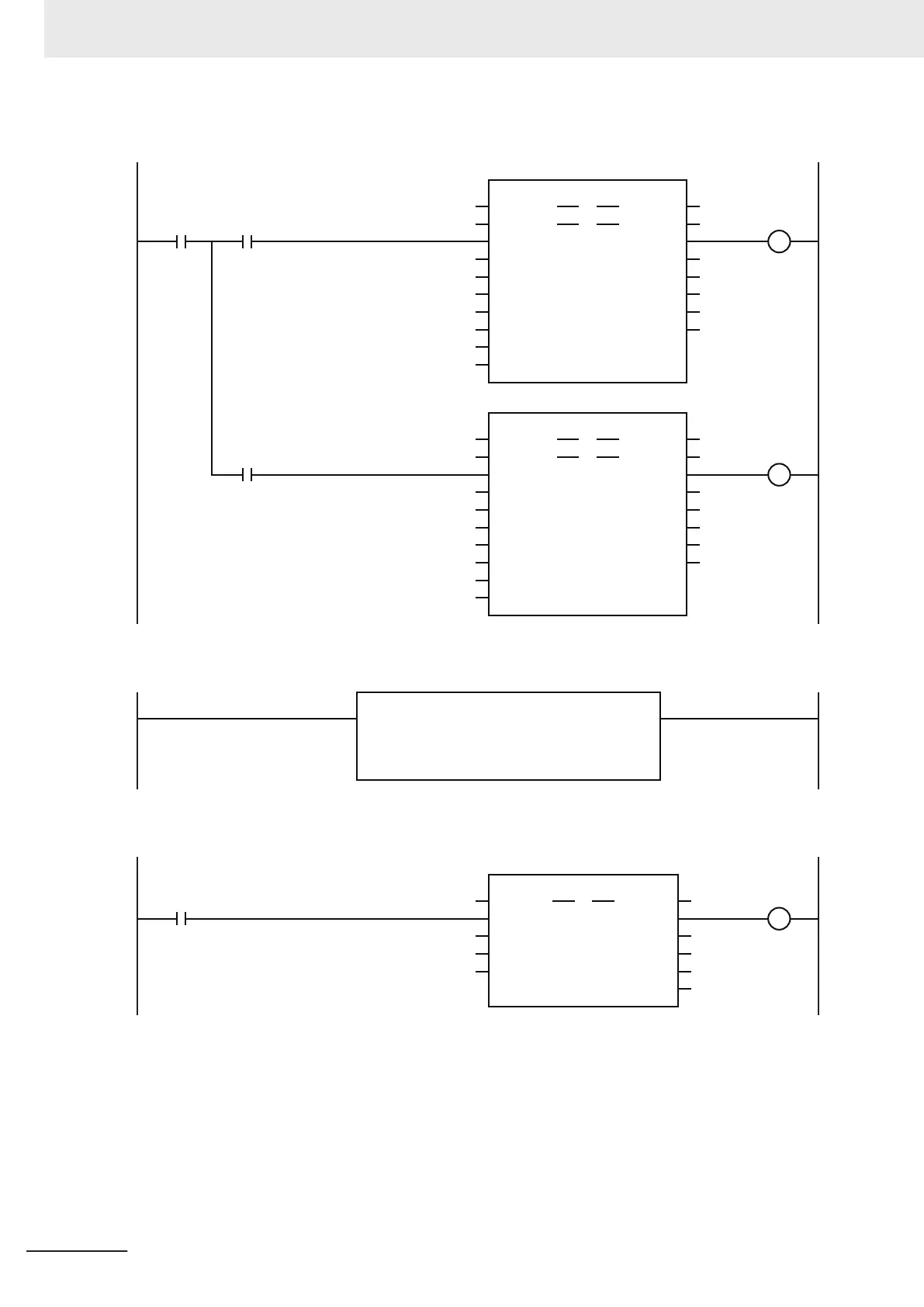
MC_GearIn
RatioNumerator Busy
MC_Axis000
MC_Axis001
Vel_InVel
Pwr2_Status
Pwr3_Status
UINT#1
UINT#2
_eMC_REFERENCE_TYPE#_mcFeedback
LREAL#4000.0
LREAL#4000.0
Gearin1_Bsy
Gearin1_Act
Gearin1_Ca
Gearin1_Err
Gearin1_ErrID
Gearin1_InGear
Jerk
Buff
erMode
GEARIN2
ReferenceType
Master
Master
Slave
Slave
Execute
InGear
RatioDenominator
Error
ErrorID
CommandAborted
Acceleration
Active
Deceleration
MC_GearIn
RatioNumerator Busy
MC_Axis000
MC_Axis002
UINT#2
UINT#3
_eMC_REFERENCE_TYPE#_mcFeedback
LREAL#4000.0
LREAL#4000.0
Gearin2_Bsy
Gearin2_Act
Gearin2_Ca
Gearin2_Err
Gearin2_ErrID
Gearin2_InGear
When the actual velocity for the master axis (axis 1) reaches the target velocity, gear operation is performed
so that the gear ratio of axis 2 (slave axis) is 1:2 and axis 3 (slave axis) is 2:3.
When the actual position of the master axis is 1000.0 or higher during gear operation of axis 2 (slave axis),
Gearout_Ex changes to TRUE.
Note: The contents of the inline ST
are given below.
GEAROUT
Sla
ve
Execute
Slave
Deceleration
OutMode Error
ErrorID
CommandAborted
MC_GearOut
Jerk
Done
Busy
MC_Axis001
Gearout_Ex
DecRate
Gearout
_Bsy
Gearout_Ca
Gearout_Err
Gearout_ErrID
Gearout_D
When Gearout_Ex changes to TRUE, gear operation is stopped for the axis 2 (slave axis).
The axis decelerates to a stop.
Contents of Inline ST
IF (Gearin1_Act=TRUE) AND (MC_Axis000.Act.Pos>=LREAL#1000.0) THEN
Gearout_Ex := TRUE;
END_IF;
3 Axis Command Instructions
3-260
NY-series Motion Control Instructions Reference Manual (W561)