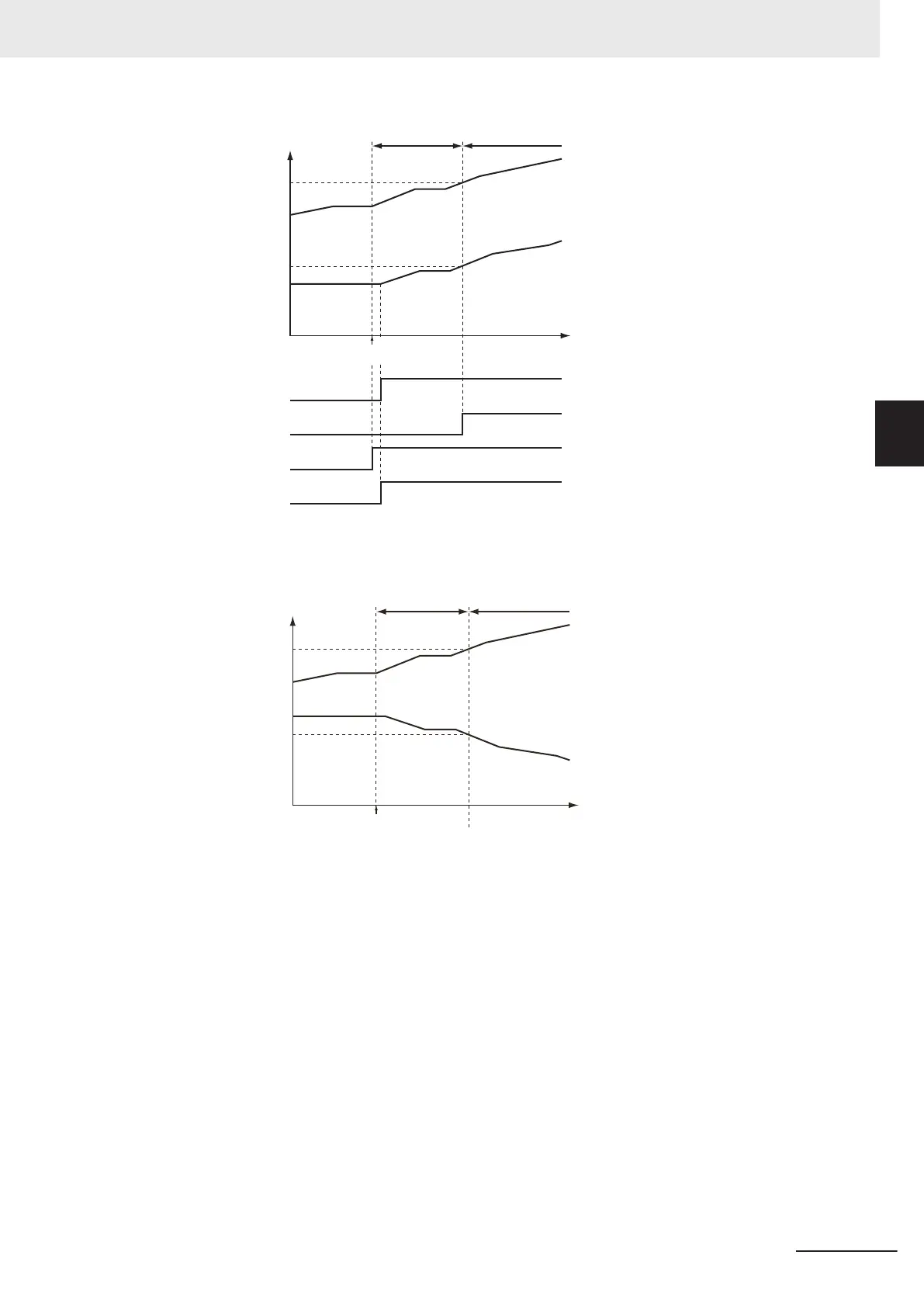
StartSync
InSyn
c
Busy
Active
MasterSyncPosition
SlaveSyncPosition
Time
Instruction executed.
Catching phase
InGear phase
• If the gear ratio is negative, the Slave (Slave Axis) and the Master (Master Axis) move in the oppo-
site directions.
MasterSyncPosition
SlaveSyncPosition
Time
Instruction ex
ecuted.
Catching phase
InGear phase
• The MC Function Module calculates the velocity profile for linear acceleration and deceleration with
the following three velocities using the Acceleration (Acceleration Rate) and Deceleration (Decelera-
tion Rate).
a) The velocity of the Slave (Slave Axis) when an instruction is executed is the initial velocity.
b) The velocity of the Master (Master Axis) when an instruction is executed multiplied by the gear
ratio is the final velocity.
c) The Velocity (Target Velocity) is the target velocity.
If the travel distance during the catching phase is too short, the target velocity will not be reached.
3 Axis Command Instructions
3-271
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearInPos
3
Function