V
m
(T
1
)
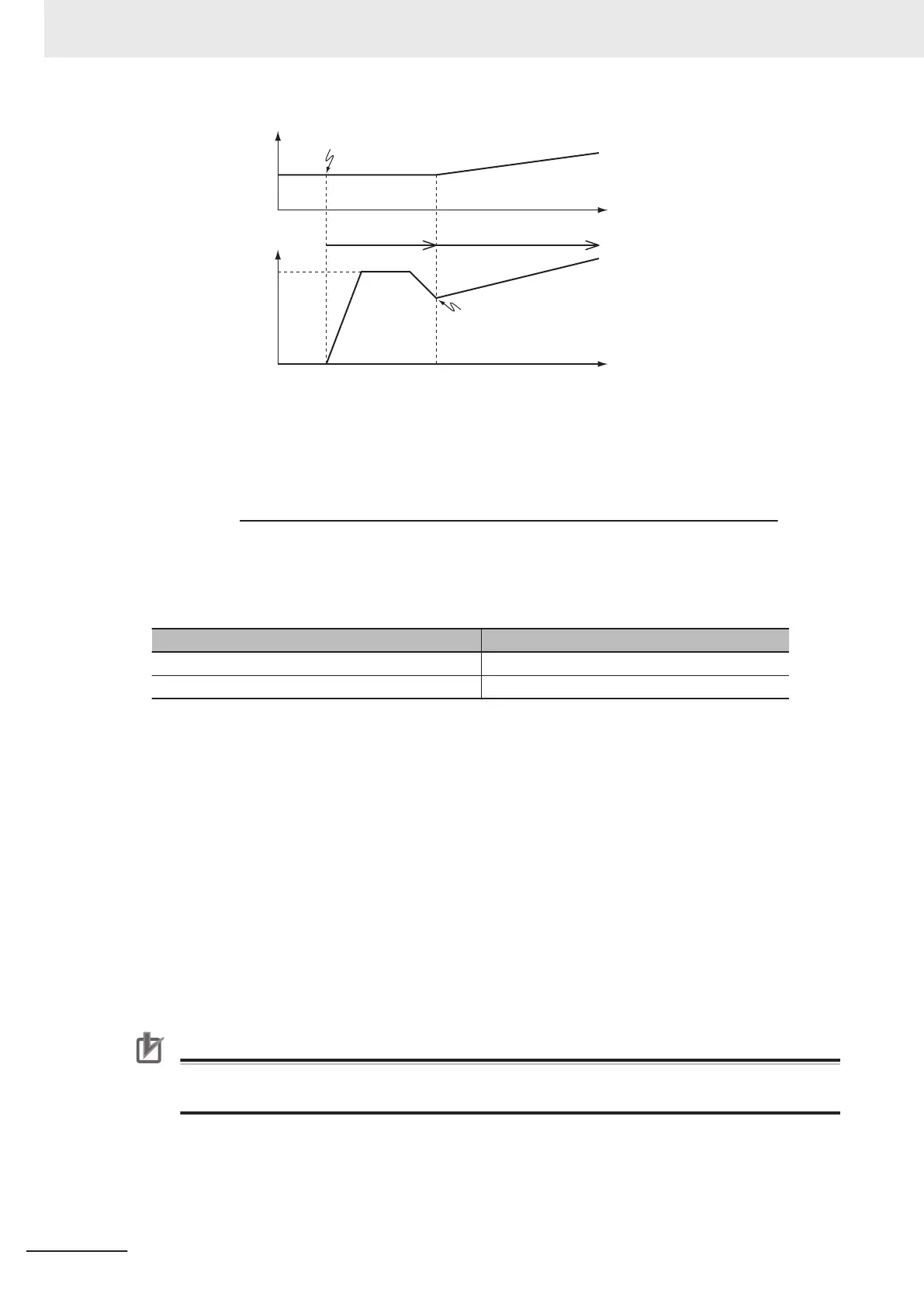
Velocity
T
1
V
m
(T
1
)
× Gear ratio
Time
Time
Master axis velocity
Slave axis velocity
Catching
phase
InGear phase
For the Slave (Slave Axis) to catch up with the Master (Master Axis) for the MasterSyncPosition
(Master Sync Position) and SlaveSyncPosition (Slave Sync Position), the following condition must
be met for the V
elocity (Target Velocity).
Velocity >
Gear ratio denominator
Master axis velocity when
MC_GearInPos is executed × Gear ratio numerator
The information that is used as the master axis velocity depends on the setting of ReferenceT
ype
(Position Type Selection).
Setting of ReferenceT
ype Information used as the master axis velocity
When _mcCommand or _mcLatestCommand is set Use the command current velocity.
When _mcFeedback is set Use the actual current velocity.
If the Slave (Slave Axis) cannot catch up with the Master (Master Axis) for the MasterSyncPosition
(Master Sync Position) and SlaveSyncPosition (Slave Sync Position), a Positioning Gear Operation
Insuf
ficient Target Velocity error (error code 5447 hex) will occur.
• When the Count Mode of the master axis is Rotary Mode, you can specify a MasterSyncPosition
(Master Sync Position) outside the range specified by the modulo maximum position and modulo
minimum position setting values. If you do, the relationship between the master axis current position
and the master axis sync position will be the same as when _mcNoDirection (No direction) is
specified for Direction in the MC_MoveAbsolute (Absolute Positioning) instruction. Refer to
MC_MoveAbsolute on page 3-53 for information on the MC_MoveAbsolute (Absolute Positioning)
instruction.
• In the same way, when the Count Mode of the slave axis is Rotary Mode, you can specify a
SlaveSyncPosition (Slave Sync Position) outside the range specified by the modulo maximum posi-
tion and modulo minimum position setting values.
Precautions for Correct Use
Refer to 1-1-3 Precautions for Master and Auxiliary Axes in Synchronized Control on page 1-
6
for precautions on the master axis.
ReferenceType (Position Type Selection)
You can select one of the following position types.
•
_mcCommand: Command position (value calculated in the previous task period)
3 Axis Command Instructions
3-272
NY-series Motion Control Instructions Reference Manual (W561)