The master axis command position that was calculated in the previous task period is used for the
current period.
The command value that was calculated for the master axis in the last periodic task is used to calcu-
late the command position of the slave axis in the current period.
•
_mcFeedback: Value obtained in the same task period
The actual position of the master axis that was obtained in the same task period is used.
• _mcLatestCommand: Command position (value calculated in the same task period)
The command position of the master axis that was calculated in the same task period is used.
This enables the use of information that is more recent than for _mcCommand. However, the axis
number of the master axis must be set lower than the axis number of the slave axis.
If the axis number of the slave axis is lower than the axis number of the master axis, Error will
change to TRUE. A Master/Slave Axis Numbers Not in Ascending Order error (error code: 5438
hex) will be output to ErrorID.
Precautions for Correct Use
Here, the task period is the primary period. The periodic task is the primary periodic task.
Additional Information
The command position that is calculated in the same task period enables greater precision in
synchronization than the command position that was calculated in the previous task period.
However
, the axis number set for the Master (Master Axis) in the system-defined variable for
motion control must be lower than the axis number set for the Slave (Slave Axis) in the system-
defined variable for motion control.
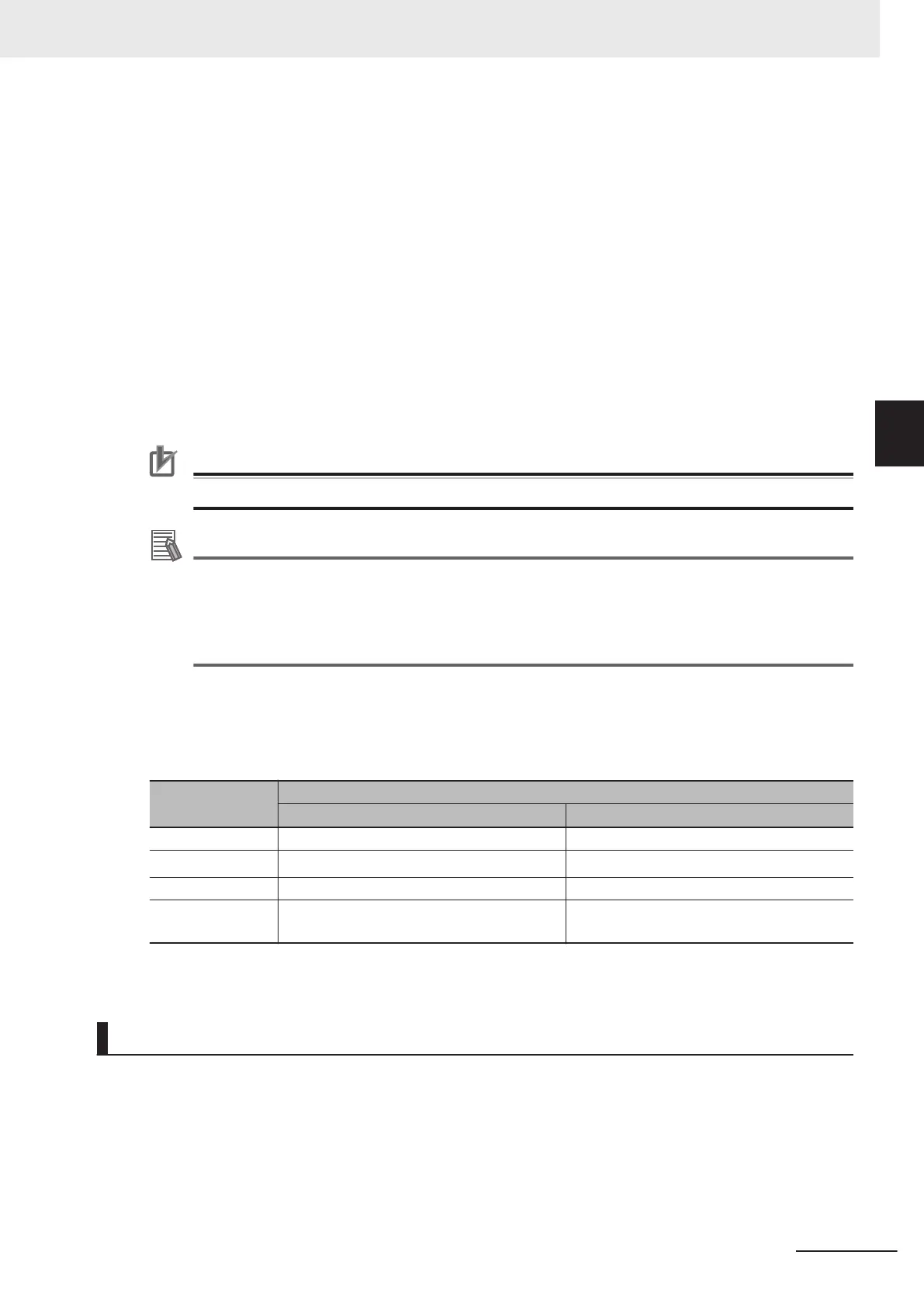
Relationship between Axis Types and Position Types
The relationship between the axis types that you can monitor and position types that is monitored is
shown below
.
Axis Type
ReferenceType
_mcCommand or _mcLatestCommand _mcFeedback
Servo axis OK OK
Encoder axis
No
*1
OK
Virtual servo axis OK OK
Virtual encoder
axis
No
*1
OK
*1. A Position Type Selection Out of Range error (error code: 5430 hex) occurs when the instruction is execut-
ed.
Timing Charts
• Electronic gear operation starts when Execute changes to TRUE.
• Busy (Executing) changes to TRUE when Execute changes to TRUE. After the operation is started,
Active (Controlling) and StartSync (Following) change to TRUE and the Slave (Slave Axis) starts the
gear operation.
•
When the MasterSyncPosition (Master Sync Position) and SlaveSyncPosition (Slave Sync Position)
are reached, InSync changes to TRUE.
3 Axis Command Instructions
3-273
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearInPos
3
Function