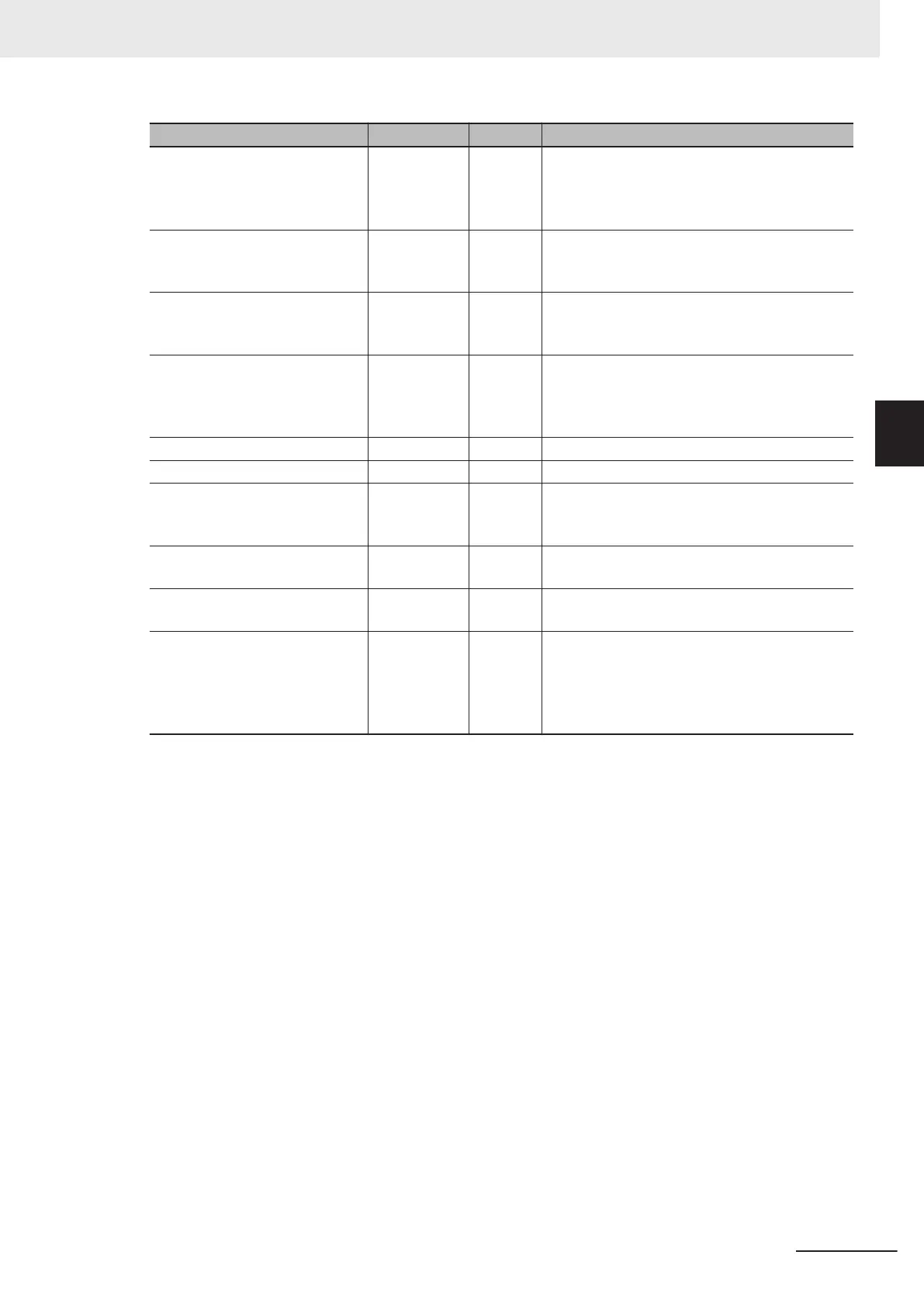
Name Data type Default Comment
Pwr2_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR2 instance of the
MC_Power instruction. This variable changes to
TRUE when the Servo is turned ON.
Hm1_D BOOL FALSE This variable is assigned to the Done output
variable from the HM1 instance of the
MC_Home instruction.
Hm2_D BOOL FALSE This variable is assigned to the Done output
variable from the HM2 instance of the
MC_Home instruction.
Vel_InVel BOOL FALSE This variable is assigned to the InV
elocity out-
put variable from the VEL instance of the
MC_MoveVelocity instruction. It is TRUE when
the target velocity is reached.
Pos1 LREAL --- This variable gives the master sync position.
Pos2 LREAL --- This variable gives the slave sync position.
StartPg BOOL FALSE The Servo is turned ON if this variable is TRUE
and EtherCA
T process data communications
are established.
Gearinpos_Ex BOOL FALSE The GEARIN1 instance of MC_GearInPos is
executed when this variable changes to TRUE.
Vel_Ex BOOL FALSE The VEL instance of MC_MoveVelocity is exe-
cuted when this variable changes to TRUE.
InitFlag BOOL FALSE This variable indicates if it is necessary to set
the input parameters.
Input parameters are set when this variable is
F
ALSE. When setting the input parameters is
completed, this variable changes to TRUE.
3 Axis Command Instructions
3-283
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearInPos
3
Sample Programming