MC_Axis000
Hm1_D
Vel_InVel
BufferMode
VEL
Jer
k
Active
Axis Axis
Execute
InVelocity
Velocity
Busy
Deceleration
Error
Direction
Continuous
MC_MoveVelocity
Acceleration
CommandAborted
ErrorID_eMC_DIRECTION#_mcPositiveDirection
LREAL#90.0
LREAL#90.0
Vel_Bsy
Vel_Act
Vel_Ca
Vel_Err
Vel_ErrID
LREAL#90.0
LREAL#0.0
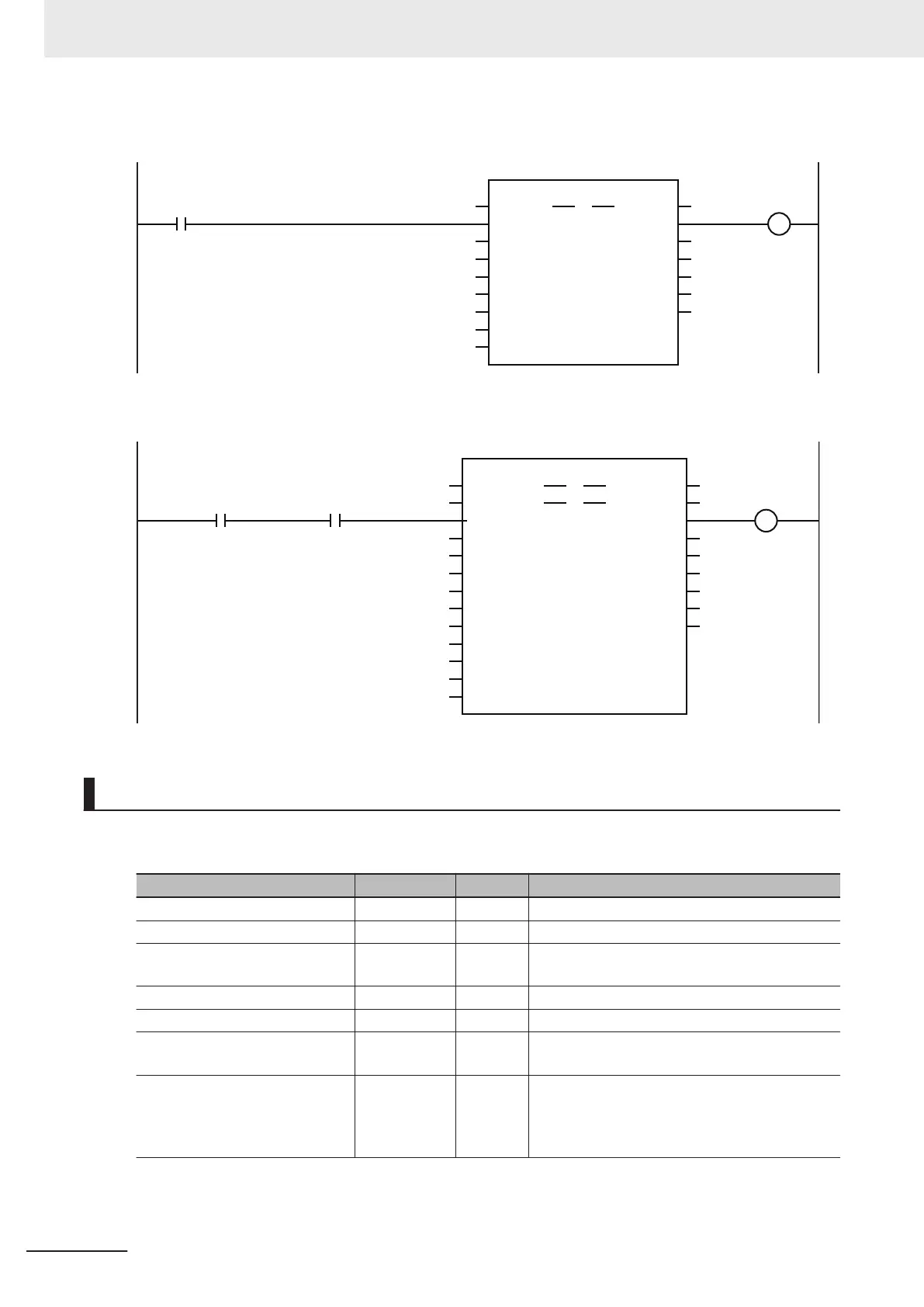
The MC_MoveVelocity (Velocity Control) instruction is executed after homing is completed for the master axis
(axis 1).
Vel_InVel
Pos1
_eMC_REFERENCE_TYPE#_mcFeedback
Gearinpos_StSync
Velocity
Acceler
ation
Deceleration
Jerk
BufferMode
GEARINPOS
ReferenceType
Master Master
Slave Slave
Execute StartSync
RatioDenominator
InSync
Error
ErrorID
CommandAbortedMasterSyncPosition
Active
SlaveSyncPosition
MC_GearInPos
RatioNumerator
Busy
MC_Axis000
MC_Axis0
01
UINT#1
UINT#2
Pos2
LREAL#180.0
LREAL#180.0
LREAL#180.0
Gearinpos_Bsy
Gearinpos_Act
Gearinpos_Ca
Gearinpos_Err
Gearinpos_ErrID
Gearinpos_InSync
MC_Axis001.Details.Homed
After homing is completed for axis 2 (slave axis), MC_GearInPos (Positioning Gear Operation) is executed to
start gear operation if
Vel_InVel of MC_MoveVelocity is TRUE.
Structured Text (ST)
Main Variables
Name Data type Default Comment
MC_Axis000 _sAXIS_REF --- Axis Variable for the master axis, axis 1.
MC_Axis000.Details.Homed BOOL FALSE TRUE when home is defined for axis 1.
MC_Axis000.MFaultLvl.Active BOOL FALSE TRUE while there is a minor fault level error for
axis 1.
MC_Axis001 _sAXIS_REF --- Axis Variable for the slave axis, axis 2.
MC_Axis001.Details.Homed BOOL FALSE TRUE when home is defined for axis 2.
MC_Axis001.MFaultLvl.Active BOOL FALSE TRUE while there is a minor fault level error for
axis 2.
Pwr1_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR1 instance of the
MC_Power instruction. This variable changes to
TRUE when the Servo is turned ON.
3 Axis Command Instructions
3-282
NY-series Motion Control Instructions Reference Manual (W561)