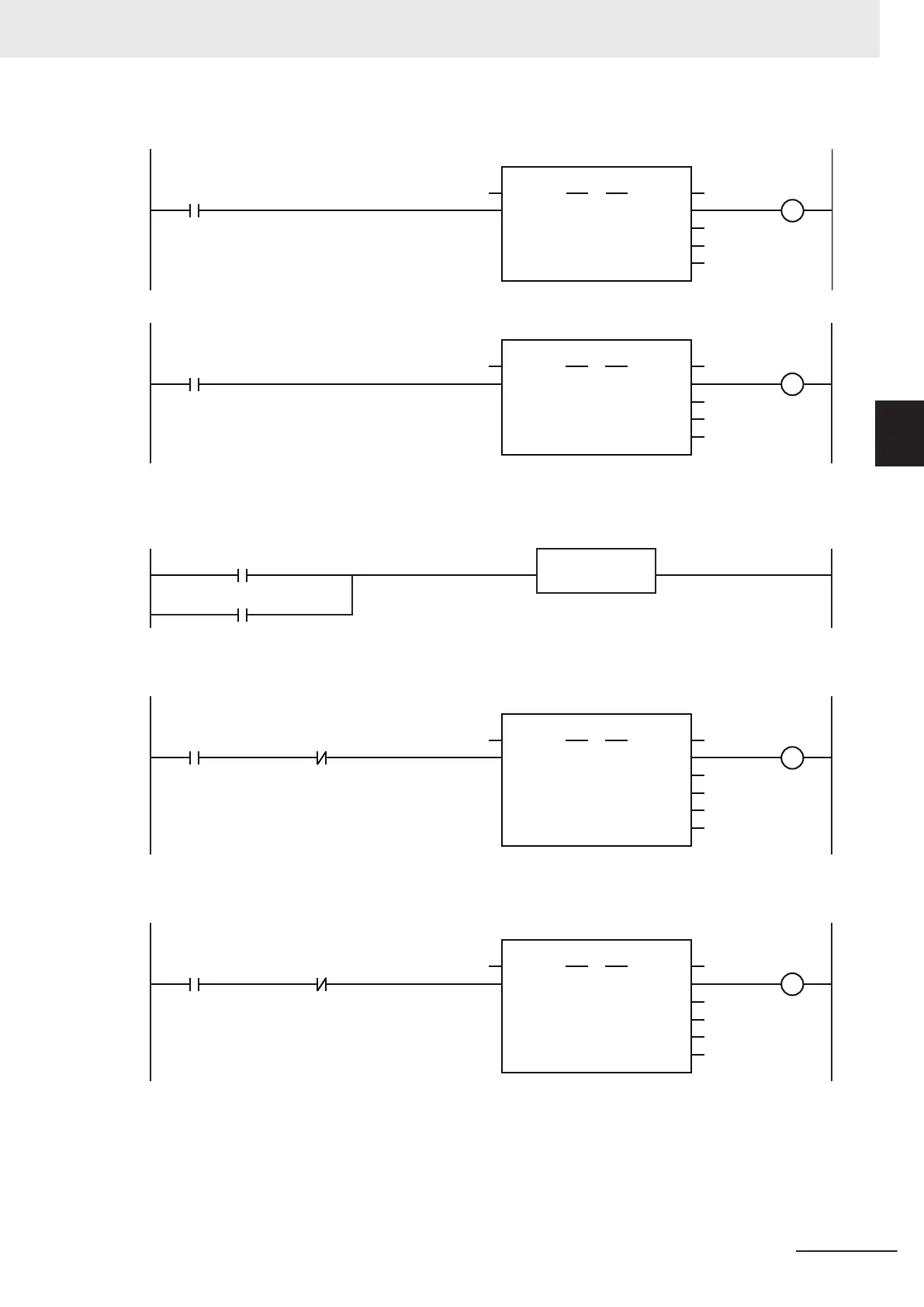
PWR1
Error
Axis Axis
Enable Status
Busy
MC_Power
ErrorID
Lock1
MC_Axis000
Pw
r1_Status
Pwr1_Bsy
Pwr1_Err
Pwr1_ErrID
If the Servo Drives are ready, the Servos are turned ON for each axis.
PWR2
Error
Axis Axis
Enable Status
Busy
MC_Power
ErrorID
Lock2
MC_Axis001
Pw
r2_Status
Pwr2_Bsy
Pwr2_Err
Pwr2_ErrID
FaultHandler
MC_Axis000.MFaultLvl.Active
FaultHandler
EN
MC_Axis001.MFaultLvl.Active
If a minor fault level error occurs for the axis composition, the error handler for the device (FaultHandler) is
executed.
Program the FaultHandler according to the device.
HM1
Axis Axis
Execute
Error
ErrorID
CommandAborted
MC_Home
Done
Busy
MC_Axis000
Pw
r1_Status
Hm1_D
Hm1_Bsy
Hm1_Ca
Hm1_Err
Hm1_ErrID
MC_Axis000.Details.Homed
If the Servo is ON for the master axis (axis 1) and home is not defined, the Home instruction is executed to
define home.
HM2
Axis Axis
Execute
Error
ErrorID
CommandAborted
MC_Home
Done
Busy
MC_Axis001
Pw
r2_Status
Hm2_D
Hm2_Bsy
Hm2_Ca
Hm2_Err
Hm2_ErrID
MC_Axis001.Details.Homed
If the Servo is ON for the slave axis (axis 2) and home is not defined, the Home instruction is executed to
define home.
3 Axis Command Instructions
3-281
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearInPos
3
Sample Programming