Timing Charts
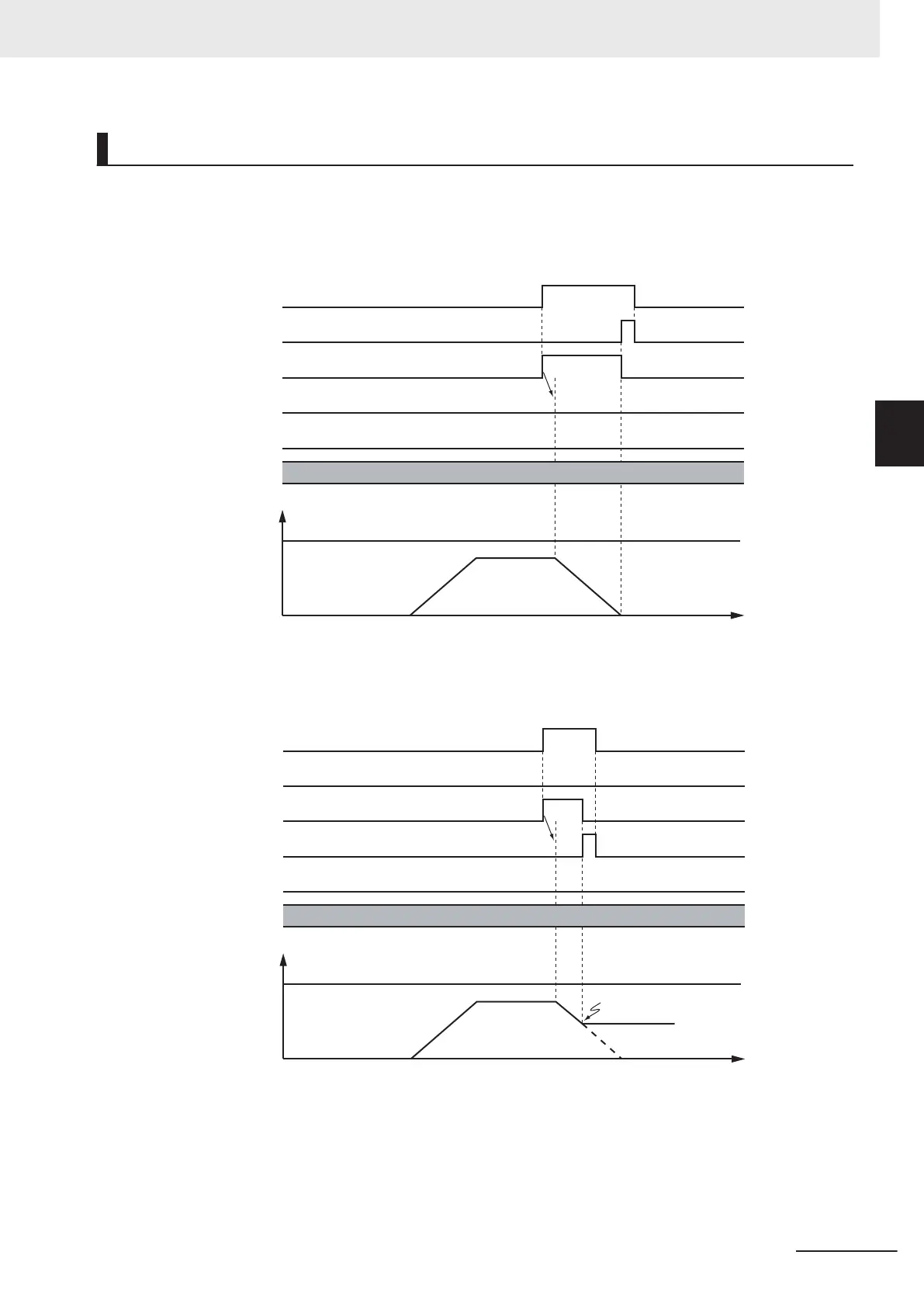
• Busy (Executing) changes to TRUE when Execute changes to TRUE.
• Done changes to TRUE when the target velocity is reached.
•
If another instruction aborts this instruction, CommandAborted changes to TRUE and Busy (Execut-
ing) changes to FALSE.
Time
Master axis velocity
Velocity
Busy
CommandAborted
Error
16#0000
ErrorID
Execute
Done
When This Instruction Is Aborted by Another Instruction
Multi-ex
ecution of
another instruction
Time
Master axis velocity
Velocity
Busy
CommandAborted
Error
16#0000
ErrorID
Execute
Done
When The Instruction Is Executed with a Deceleration (Deceleration Rate) of 0
If Deceleration (Deceleration Rate) is set to 0 and the instruction is executed, the axis will stop without
decelerating.
The following chart shows an operation example of when Deceleration (Deceleration Rate) is 0.
3 Axis Command Instructions
3-291
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearOut
3
Function