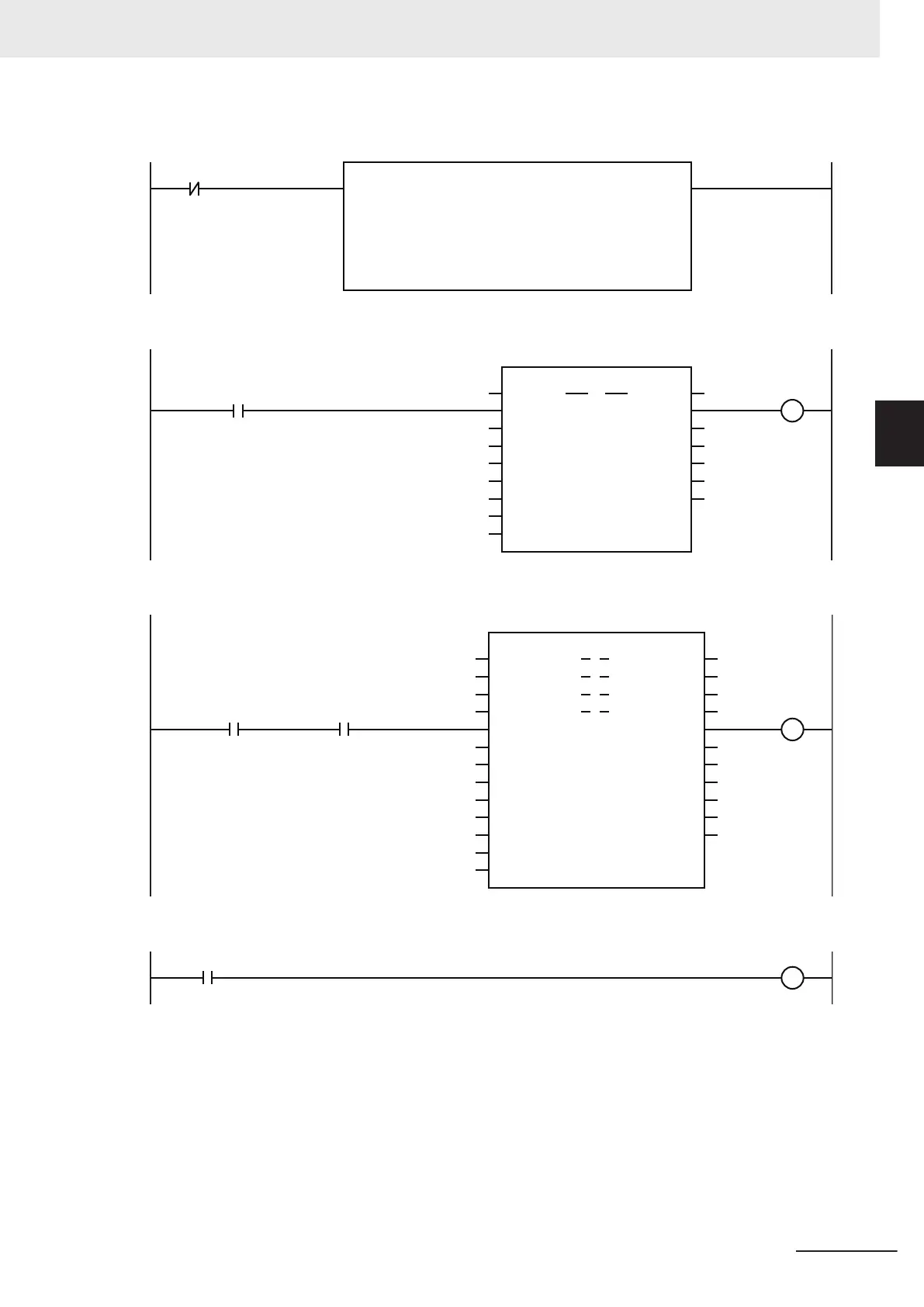
InitFlag
Note: The contents of the inline ST are
given below.
The parameters are set for the MC_MoveVelocity (Velocity Control) and MC_MoveLink (Synchronous
Positioning) instructions.
MC_Axis000
MC_Axis000.Details.Homed
Vel_InVel
BufferMode
VEL
Jer
k
Active
Axis Axis
Execute
InVelocity
Velocity
Busy
Deceleration
Error
Direction
Continuous
MC_MoveVelocity
Acceleration
CommandAborted
ErrorID
Vel_Vel
Vel_Acc
Vel
_Bsy
Vel_Act
Vel_Ca
Vel_Err
Vel_EIrrD
Vel_Dec
The MC_MoveVelocity (Velocity Control) instruction is executed if home is defined for axis 1.
MasterDistanceInACC
MasterDistanceInDEC
LinkOption
MasterStartDistance
BufferMode
MV_LINK
ReferenceType
TriggerVariable
Master
Master
Slave
Slave
TriggerInput TriggerInput
Execute
InSync
Error
ErrorID
CommandAborted
SlaveDistance
ActiveMasterDistance
MC_MoveLink
TriggerVariable
Done
Busy
MC_Axis000
MC_Axis001
Mv_Link_TrigRef
Mv_Link_TrigVar
MC_Axis001.Details.Homed
Mv_Link_SlvDis
Mv_Link_MasDis
Mv_Link_MasDisInAcc
Mv_Link_MasDisInDec
Mv_Link_LnkOpt
Mv_Link_Bsy
Mv_Link_Act
Mv_Link_Ca
Mv_Link_Err
Mv_Link_ErrID
Mv_Link_InSync
Mv_Link_D
Vel_InVel
The MC_MoveLink (Synchronous Positioning) instruction is executed if home is defined for axis 2 (slave axis).
Actuator
Mv_Li
nk_InSync
Actuator is TRUE while the axes are synchronized.
Contents of Inline ST
// MC_MoveVelocity parameters
Vel_Vel := LREAL#1000.0;
Vel_Acc := LREAL#0.0;
Vel_Dec := LREAL#0.0;
// MC_MoveLink parameters
Mv_Link_TrigRef.Mode := _eMC_TRIGGER_MODE#_mcDrive;
3 Axis Command Instructions
3-311
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveLink
3
Sample Programming