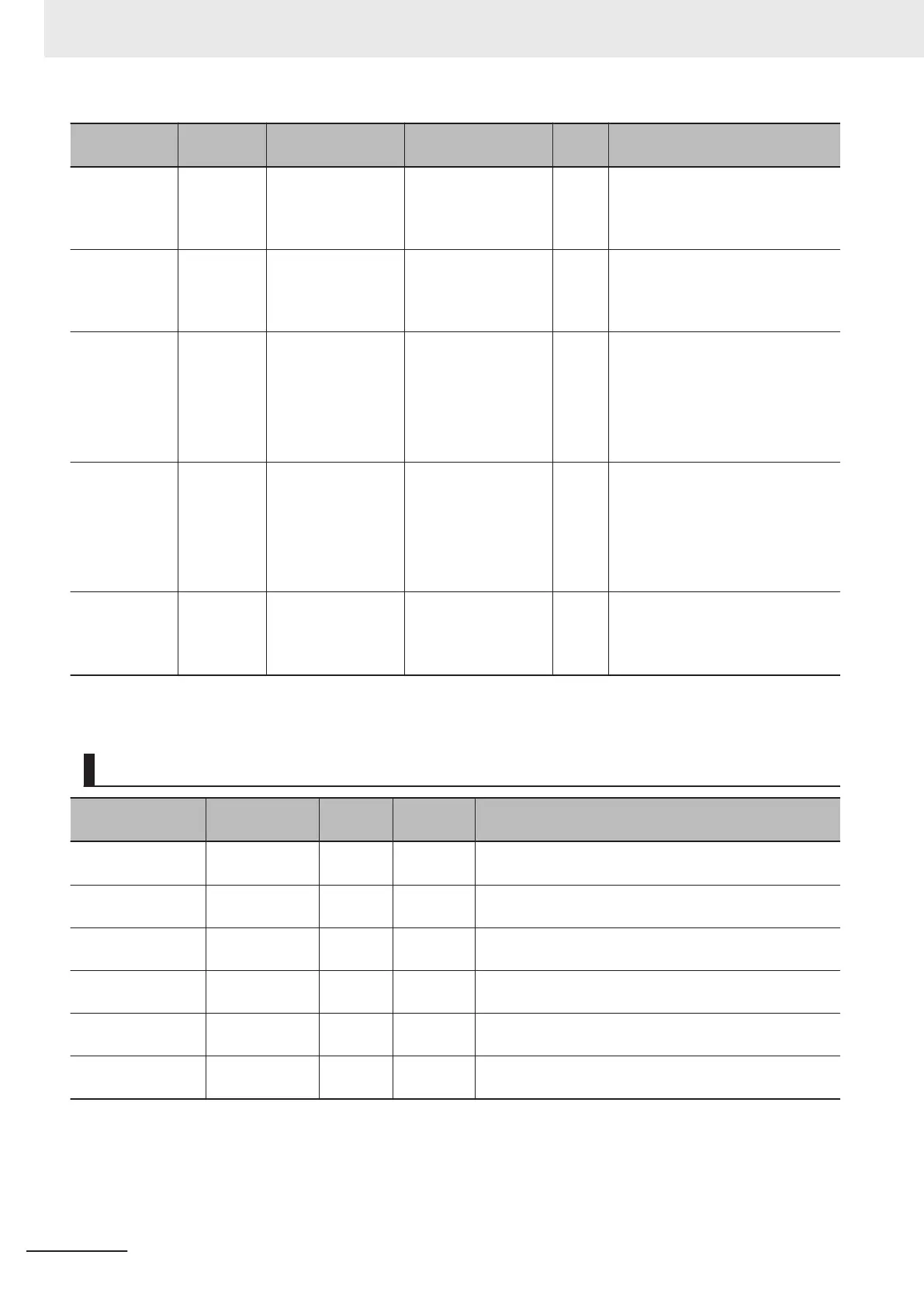
Name Meaning Data type Valid range
De-
fault
Description
RatioNumera-
torAuxiliary
(Reserved)
Auxiliary
Axis Gear
Ratio Nu-
merator
DINT Positive or negative
number
10000 (Reserved)
RatioDenomi-
natorAuxiliary
(Reserved)
Auxiliary
Axis Gear
Ratio De-
nominator
UDINT Positive number 10000 (Reserved)
ReferenceTy-
peMaster
Master Axis
Position
T
ype Selec-
tion
_eMC_REFER-
ENCE_TYPE
1: _mcFeedback
2: _mcLatestCom-
mand
2
*1
Specify the position type of the
master axis.
1: Actual position (value obtained
in the same task period
*2
)
2: Command position (value calcu-
lated in the same task period
*2
)
ReferenceTy-
peAuxiliary
Auxiliary
Axis Posi-
tion T
ype
Seleciton
_eMC_REFER-
ENCE_TYPE
1: _mcFeedback
2: _mcLatestCom-
mand
2
*1
Specify the position type of the
auxiliary axis.
1: Actual position (value obtained
in the same task period
*2
)
2: Command position (value calcu-
lated in the same task period
*2
)
BufferMode Buffer
Mode Se-
lection
_eMC_BUF-
FER_MODE
0: _mcAborting
0
*1
Specify the behavior when execut-
ing more than one motion instruc-
tion.
0: Aborting
*1. The default value for an enumeration variable is actually not the number, but the enumerator.
*2. The task period is the primary period.
Output Variables
Name Meaning
Data
type
Valid
range
Description
InCombination Axes Combined BOOL TRUE or
F
ALSE
TRUE when axes are combined.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE when the axis is being controlled.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
ErrorID Error Code WORD
*1
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
*1. The upper four digits of the event code give the error code for ErrorID. Refer to the NY
-series Troubleshooting Manual
(Cat. No. W564) for the event codes.
3 Axis Command Instructions
3-318
NY-series Motion Control Instructions Reference Manual (W561)