Time
Current torque
Time
Torque control
Position control
Torque
When the axis is held
against the workpiece
Torque control
Position control
Current velocity
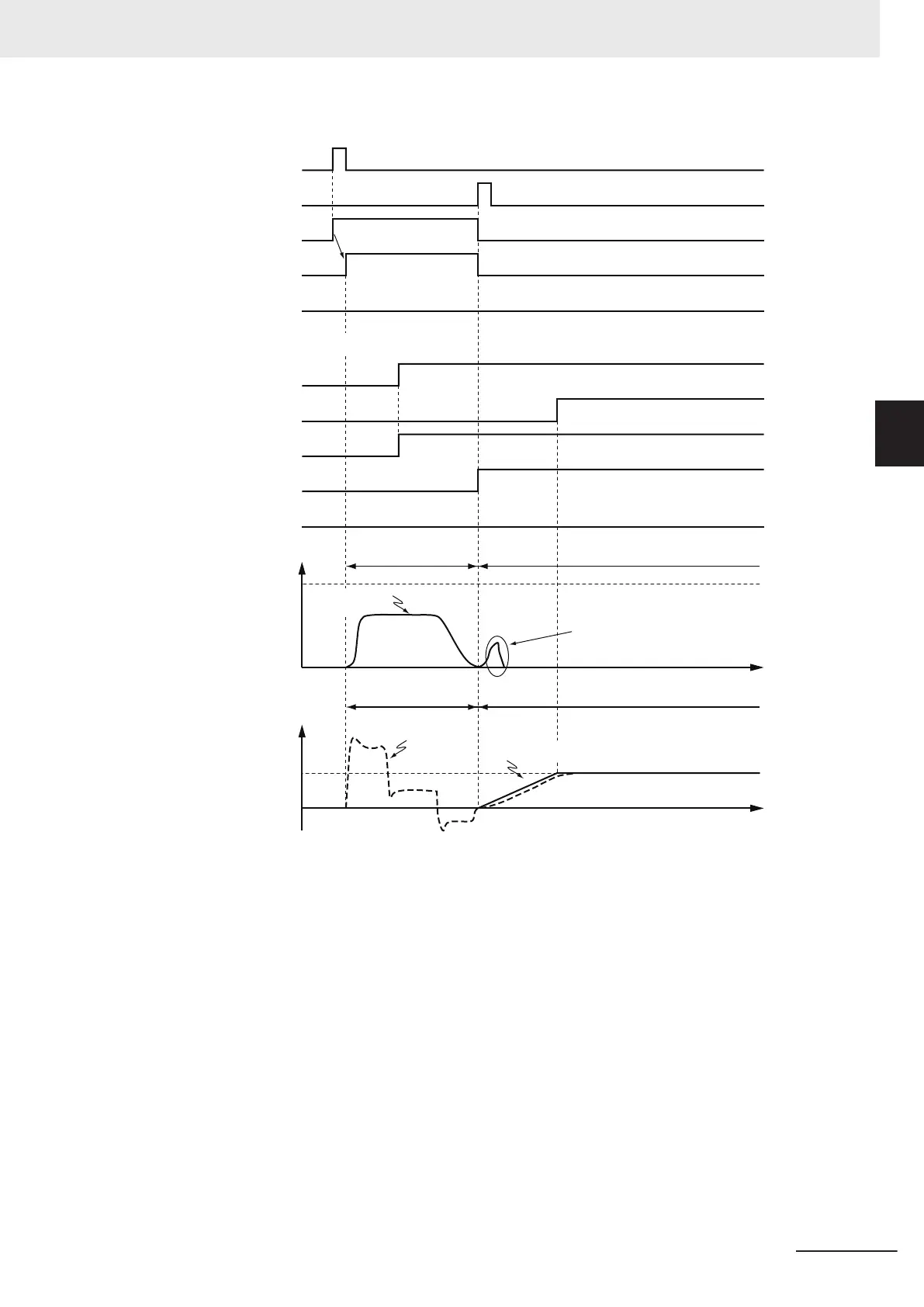
Position Control Instruction (First Instruction)
Active
Busy
CommandAborted
InTorque
Execute
Torque
Active
Busy
CommandAborted
Done
Execute
Velocity
MC_TorqueControl Instruction (Second Instruction)
Axis current
velocity
Command torque
Changing the Control Mode
• If you execute the MC_TorqueControl instruction while a position control instruction, such as the
MC_MoveAbsolute (Absolute Positioning) or MC_MoveRelative (Relative Positioning) instruction, is
in execution, the operation depends on the setting of the BufferMode (Buf
fer Mode Selection) of the
MC_TorqueControl instruction.
If BufferMode is set to Aborting, the Control Mode changes to Torque Control as soon as the in-
struction is executed. If the Buffer Mode is set to Buffered, the Control Mode changes to Torque
Control after the previous operation is completed.
• If the MC_TorqueControl instruction is aborted by other instructions such as MC_MoveAbsolute (Ab-
solute Positioning), or if an axis error occurs, the Control Mode changes to Position Control at that
point.
• Active (Controlling) changes when the instruction is executed, but it takes several periods for the
Control Mode in the Servo Drive to change. The time that is required for the Control Mode to change
depends on the Servo Drive.
3 Axis Command Instructions
3-343
NY-series Motion Control Instructions Reference Manual (W561)
MC_TorqueControl
3
Function