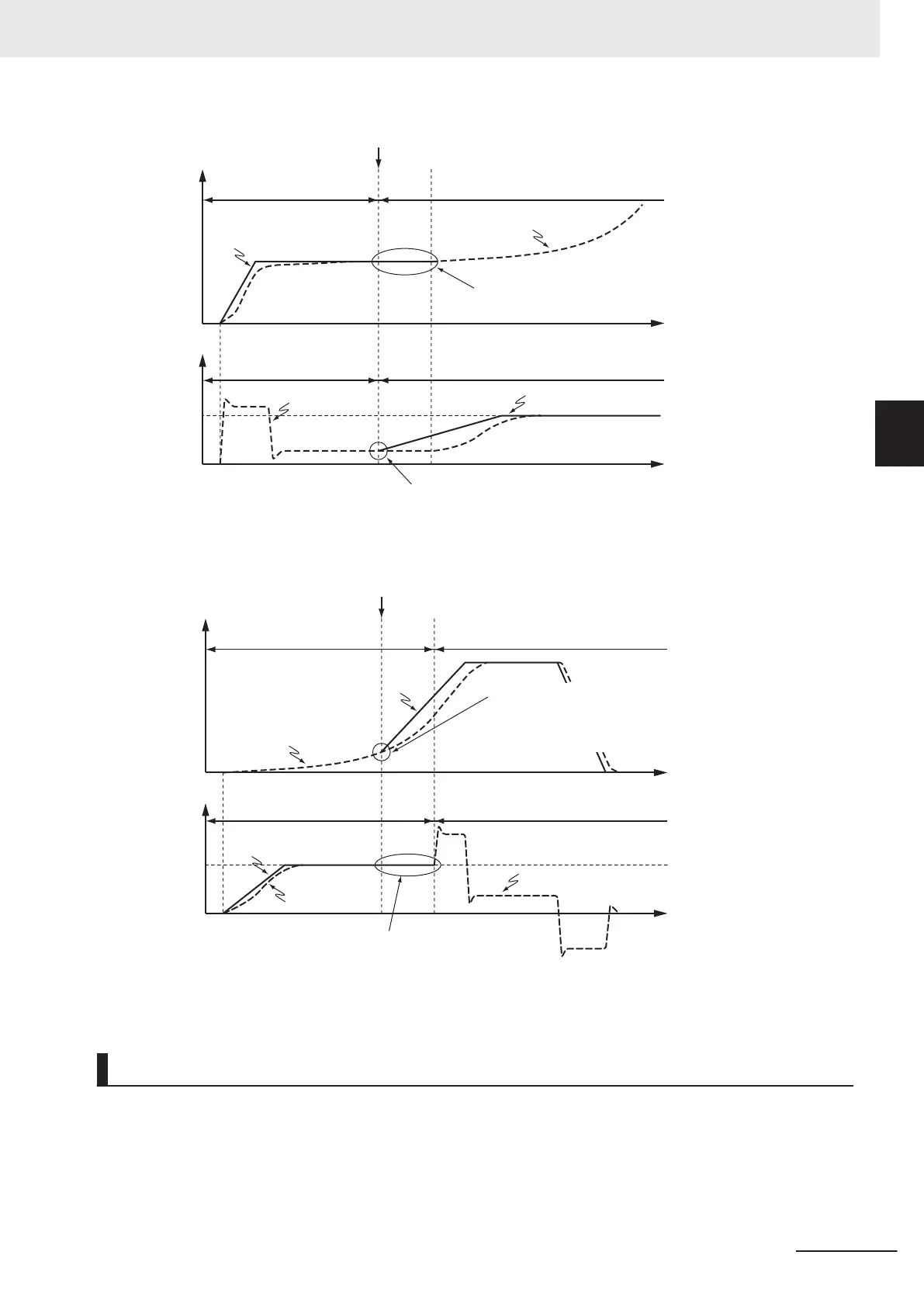
Torque
Time
The
first command torque when this
instruction is executed is the current torque.
Command torque
Current torque
Time
Torque controlPosition control
Torque
The command velocity of this
instruction is maintained until
torque control is started.
Command velocity
Current velocity
Torque controlPosition control
Current velocity
MC_TorqueControl executed.
Changing from Torque Control to Position Control
Torque
Comm
and velocity
Current torque
The command torque when the
position control instruction is
executed is used until position
control is started.
Time
Current torque
Command torque
Position control
Torque control
Torque
Time
The first command velocity
when the position control
instruction is executed is the
actual current velocity.
Current velocity
Position controlTorque control
Current velocity
Position control instruction is executed.
Re-execution of Motion Control Instructions
You can change the operation of the instruction if you change the input parameter during torque con-
trol and then change Execute to TRUE again.
You can change the Torque (Target Torque), TorqueRamp, and Velocity (Velocity Limit) input variables
by re-executing the motion control instruction.
3 Axis Command Instructions
3-345
NY-series Motion Control Instructions Reference Manual (W561)
MC_TorqueControl
3
Function